 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Прецизионные датчики, индукция
1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
условие (14) выполняется, если выполняются условия (21), (22) (23), а также
laquo;ft + Pft = -(*-l)i гдег1=1, 2, 3,. . ., г+гт ; (28) 2л
Фгт ; г=0, 1,2,. . . а Р = 0, 2л, 4л, . . .
а/ -Р7= 0. 2л, 4л ... .
Выполнение условий (21)-(27) означает, что векторы [/ имеют равные (или отличающиеся на 2ла) аргументы, а векторы Uil образуют симметричную звезду из равных по модулю векторов, сумма которых равна нулю (рис. 27), и что
(29) (30) (31)
Выполнение условий (21), (22), (23), (28)-(31) означает, что векторы Uji имеют равные аргументы, а векторы Uyji образуют симметричную звезду равных по модулю векторов, сумма которых равна нулю (рис. 28), и что
g.g e( ~ ?
ga + J] gi
(32)
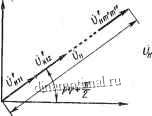
Рис. 27. Векторная диаграмма симметричного ФВ С прямовращающейсч фазой
:,п , .-.tr
ни nil
lt;JHmm
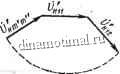
Рис. 28. Векторная диаграмма симметричного ФВ с обратновращающейся фа-
- ЗОЙ
Представление выходного напряжения в виде двух составляющих, имеющих прямо и обратно вращающуюся в зависимости от ф фазу, оказывается удобным при анализе погрешностей ФВ, когда напряжение помехи представляется также в виде двух составляющих, влияние которых на фазу выходного сигнала оценивается раздельно. Погрешность ФВ (если пренебречь косвенным влиянием изменения амплитуды) может быть выражена следующим образом:
Дф = Д arg t/н - А arg L/o,
т. е. определяется изменениями arg и arg t/o. Аргумент t/ , а следовательно, и его погрешность, как это видно из выражений (8). (9), (10), зависит от величины Ub, н, g, gir Zm и выполнения соотношений между ними, которые выведены и приняты выше.
Погрешность аргумента 1/н может быть вызвана двумя причинами: во-первых, отклонением действительных значений параметров элементов ФВ от расчетных; во-вторых, изменением этих параметров во времени. И в том и другом случаях текущее значение параметра элемента может быть рассмотрено как сумма расчетного значения и приращения.
При значениях приращений, значительно меньших значений самого параметра, погрешность аргумента Lh с точностью до величины второго порядка малости можно представить в виде
Д (arg t/н)
(33)
А arg t/н =
где fli и Afli -значение параметра элемента и его приращения; - параметр элемента, по которому приводится определение погрешности; п - число параметров. Как было сказано выше, погрешность ФВ удобно определять, вначале определив отклонение выходного напряжения от расчетного в виде двух напряжении вида и и и . Это можно показать следующим образом. Пусть
t/H=t/Hp + At/ + A(7;.
- составляющая выходного напряжения, вызванная погрешностью f-ro параметра, имеющая прямовращающуюся в зависимости от ф фазу, t/Hp6i - модуль этой составляющей, а (со lt;-1-рф+ф) его аргумент, причем 6 представляет собой отно сительное значение модуля погрешности выходного напряжения вызванного погрешностью f-ro параметра; AU -составляющая
выходного напряжения, имеющая обратновращающуюся в зависимости от ф фазу, вызванная погрешностью i-ro параметра;.
[/hp6i- - модуль, а со lt;-рф-ф -аргумент, причем есть,
относительное значение модуля At/ i; тогда с точностью до погрешностей второго порядка малости можно записать, что
1 -Ь 2 cos (arg Д{/; - arg [/ р) +
+ 2 i ( S Afi, - arg f/нр) i=i
Ы+Р+ - -I- 6%in (arg AU -are l4p) + 1=1
+ 2 6;sin(argAf/;-argl/ p)
(35)
Как следует из выражения (35), задача определения погрешности ФВ сводится к задаче определения AU и AU . Эта задача решается, если принять
да
... дй:
значения u и t/ должны быть взяты из выражений (9) и (Ю). Анализ выражения (35) показывает, что, если направления изме; нений фазы составляющей выходного напряжения, вызванной погрешностью i-ro параметра и выходного напряжения, совпадают.
| 1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |




