 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Прецизионные датчики, индукция
1 2 [ 3 ] 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 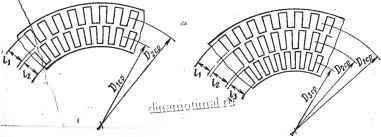
Рис. 4. Бессекторная двухфаз- Рис. 5. Бессекторная двухфазная пая обмотка из двух колец обмотка из .трех колец
обмотками. Использование многослойных обмоток в индуктосине позволяет решить несколько важных задач, в том числе таких, как повышение мощности выходного сигнала, повышение точности датчика и расширение его функциональных возможностей.
Многослойной может быть как однофазная обмотка, так и двухфазная. В двухслойной однофазной обмотке (рис. 6) слои сдвинуты на 180 эл. град и включены последовательно встречно. Благодаря этому токи, текущие по лобовым частям, направлены встречно и действие их в значительной степени компенсируется. Основной же смысл разделения однофазной обмотки на несколько слоев состоит в том, что, во-первых, каждый слой в силу его меньшей толщины может быть выполнен с более высокой точностью, а значение индукции в зазоре при малой изоляционной прокладке между слоями останется практически тем же, что и у однослойной обмотки соответствующей толщины - при равенстве мощностей, выделяемых в обмотках; во-вторых, многослойность однофазной обмотки представляет дополнительные возможности для улучшения синусоидальности функции индукции в воздушном зазоре. Для этого слои могут сдвигаться друг огносительно друга.
Значительный эффект в части повышения точности датчика дает использование многослойных двухфазных обмоток. На рис. 7 показано сечение двухслойной секторной двухфазной (А, Б) обмотки с транспонированием (чередованием положения секций) фазы из слоя в слой. Теоретически возможны также двухслойные двухфазные бессекторные обмотки (рис. 8). В этом случае одно-
М слой 2-й. слой

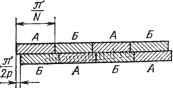
Рис. 6. Расположение слоев однофазной двух-1, слойной обмотки
Рис 7 Двухслойная двухфазная обмотка с транспонированием фазы из слоя в слой
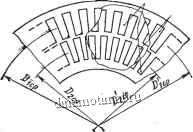
фазная обмотка должна пглпа Внитренниа слой. иметь вид, показанный /на
Внешний слои ьнутр Однако для испоу1ьзо-
вания в амплитудном И( про-Фаза В фазовых режимах . двух-
фазные бессекторные обмотки и в том числе многослойные пока практически нереализуе-мы в связи с невозможностью выполнить крайне жесткие допуски на параметры обмоток.
Для построения некого рых типов фазовращателей на основе индуктосина требуется наличие как на роторе, так и на статоре двухфазных
Рис. 8. Двухслойная двухфазная
секторная обмотка преимуществ перед
обычными фазовращателями с пульсирующим полем или двухфазным возбуждением.
Четырехобмоточный индуктосин может быть реализован сопряжением обычной секторной фвухфазной обмотки (см. рис. 1, е) или двухслойной (см. рис. 7) с двухфазными однослойными обмотками (см. рис. 4. 5) или двухслойной (рис. 8). Перспективной конструкцией обмоток четырехобмоточного индуктосина является такая, когда одна из систем образована обмотками по рис. 8, а вторая двухфазная система состоит из двухслойной обмотки, каждый слой которой выполнен по пис. 3, а слои сдвинуты друг относительно друга на 90 эл. град. Несимметрия второй системы не имеет принципиального значения.
Поскольку индуктосин является многополюсным датчиком, в позиционных преобразователях угла он может быть использован лишь в соединении с датчиком грубого отсчета. В качестве последнего может быть применен любой датчик с р=1.
В некоторых случаях, когда объем для размещения отдельного датчика грубого отсчета обычного электромашииного типа недостаточен - в качестве грубого отсчета может быть использован датчик с плоскими печатными обмотками с р=1. Может быть предложено несколько вариантов подобных датчиков. Один из вариантов обмоток с р=1 представлен на рис. 9. Однофазная обмотка (рис. 9, а) поедставляет собой двухзаходную спираль Архимеда с шагом 2т. При подаче напряжения к точкам 1-2, протекающий по обмотке ток создает поле, которое в радиальном сечении имеет периодический знакопеременный характер. Двухфазная обмотка (рис. 9, б) имеет вид четырехзаходной спирали. Направление оас-крутки спиралей первичной и вторичной обмоток различное. Шаг спиралей на роторе и статоре может быть различным; такая сигнальная обмотка подобна распределенной радиальной обмотке и обеспечивает более высокую синусоидальность коэффициентов взаимоиндукции. Для того чтобы избежать коаевых эффектов, начальные и конечные радиусы спиралей одной из обмоток полностью перекрывают эти величины для другой обмотки.
В тех случаях, когда число пар полюсов индуктосина по тем или иным причинам мало (10-30), радиальное расположение про-
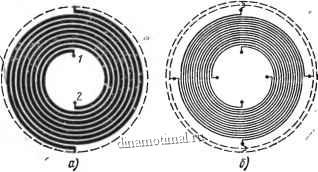
Рис. 9. Плоская печатная обмотка с р=1: а - однофазная; б - двухфазная
водников может оказаться нерациональным в связи с их малой
суммарной длиной и малым выходным сигналом. При выборе же числа витков на полюс и фазу больше единицы лобовые части заняли бы значительную часть полезной площади несущего диска. В этом случае проводники возможно выполнять также в форме крутой спирали/ Архимеда, шаг которой зависит от числа пар полюсов, начального и конечного диаметров. Нужно, однако, иметь в виду, что хотя при выполнении проводников многополюсной обмотки в виде спирали и может быть увеличен выходной сигнал, но одновременно с этим увеличивается чувствительность датчика к технологическим погрешностям за счет более резкого изменения сигнала в функции зазора.
2. СЛЕДЯЩИЕ СИСТЕМЫ НА ОСНОВЕ ИНДУКТОСИНА
Следящие системы (СС) с индуктосином можно разделить на три основных разновидности; измерительные СС, СС точного задания угла, синхронно-следящие СС.
В измерительной СС индуктосин служит датчиком угла и устанавливается на вал, угол поворота которого подлежит точному измерению. Приемником СС может служить двухполюсный датчик
любого типа. В такой СС повороту датчика на угол соответ-
ствует поворот приемника на угол 2л;. При больших значениях р измерение с относительно невысокой точностью угла поворота приемника дает возможность судить с высокой точностью об угле поворота вала с индуктосином. Измерение угла поворота приемника может осуществляться либо визуально -с помощью шкал, установленных в кинематической цепи отработки рассогласования,- либо автоматически, если в этой цепи установлен кодовый преобразователь угла относительно низкой разрешающей способности.
Таким образом, областью применения такнх систем является визуальный точный контроль за положением вала или контроль с автоматической регистрацией.
| 1 2 [ 3 ] 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |




