 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Прецизионные датчики, индукция
1 2 3 4 [ 5 ] 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
НеХостатком схемы является наличие двух согласующих трансформаторов с весьма малым разбросом электрических параметров.
На рис. 14 представлена схема еледящей системы, осуществляющей точйое введение угла в объект управления ОУ с контролем по шкалам.
Объединив две следящие системы (рис. 13, 14) в одну, получим синхронно-следящую систему передачи угла (рис. 15) со связями индуктосин - ВТ-ВТ - индуктосин.
Однако существует более рациональный вариант построения синхронно-следящего привода на индуктосинах [12], представленный на рис. 16. Здесь схема измерителя рассогласования вклю- давт дополнительно двухполюсный ВТ, связанный через редуктор с индуктосином-приемником.
Такая схема обладает всеми достоинствами синхронной передачи, имеет крутизну характеристики измерителя рассогласования, пропорциональную первой степени коэффициента передачи по напряжению многополюсной машины.
В канале ГО могут быть нспользовапы любые двухполюсные индуктивные или емкостные датчики (например, сельсины, вращающиеся трансформаторы и др.), канал же точного отсчета содержит два индуктосина с числом пар полюсов р и один двухполюсный ВТ (например, бесконтактный ВТ типа 5БВТ).
На входной вал, информацию об угловом положении которого необходимо передать с высокой точностью, устанавливают датчик грубого отсчета (Вдго) и индуктосин - датчик ТО (Hi).
С выходным валом (валом нагрузки) следящей системы сопряжены двухполюсный приемник грубого отсчета (ВГпго), нндукто-син-приемник точного отсчета (И), а также дополнительный двухполюсный ВТ (ДВТ) - приемргик ТО, связанный с исполнительной осью (ротором Яг) через редуктор с передаточным числом р.
Принцип работы схемы состоит в следующем. -
Разность или сумма напряжений, пропорциональных синусу угла поворота ротора Hi и синусу угла поворота ротора Яг, подается на одну из статорных обмоток ДВТ, а разность или сумма напряжений, пропорциональных косинусу указанных углов, - на другую.
lt;
Рис. 16. Схема следящей системы передачи угла на двух индуктосинах с использованием дополнительного двухполюсного ВТ
в результате на роторной обмотке ДВГ окажется напряжение
Ш = [(fet/i sin РФ1 Т sin РФ5,) cos Ф2 - (fej/i COS T
T feya fos рф2)81п Ф2 = /п[;з[[/1 sin (p lt;Pi - Ф2) T [/г п (рФа- Фг)].
(За)
где t/n=l/rasinw lt; - напряжение питания индуктосннов; fet/i, kui, ku3 - коэффициенты трансформации соответственно Я И2 и ДВТ (причем А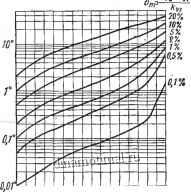
10 deg; 20 deg; 30 deg; W deg; S0 deg; 60 deg; 70 deg; еО deg; SOAqi-
Рис. 17. Семейство рАф=/(Дф2)
кривых
Полученные соотношения позволяют достаточно просто задавать требования к составляющим ошибкам Аф2р и Афгдвт допустимому неравенству ku\ и ku2.
Для реально существующих значений рбО и А(12р~Дф2ДВТ влиянием Дф2двхнз ошибку можно пренебречь.
Как будет показано ниже, наиболее точные индуктосины, имеющие бессекторные многослойные обмотки, могут быть использованы практически только в режиме фазовращателя, поэтому схемы следящих систем с фазовращателями заслуживают особого внимания. Простейшая схема фазовой следящей системы представлена на рис. 18. На схеме обозначения те же, что и на рис. 17, ФВ - фазовращатели.
Основной недостаток такой системы - малая фазовая стабильность, обусловленная необходимостью тщательной фильтрации сигналов фазовращателей датчика и приемника, поступающих на фазовый детектор. Если фазовый детектор выполнить в виде аналогового перемножающего устройства, условия несколько облегча-
Ur 1-
gt;
Рис. 18. Схема следящей системы передачи угла в фазовом режиме
| 1 2 3 4 [ 5 ] 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |




