 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Системы регулирования
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 [ 101 ] 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193
SMf- 5 СЦ- * УСТОЙЧИВОСТИ РЕГУЛИРОБАТТНЯ 309
sect;8 2. Оценка устойчивости и качества регулирования
324. Система регулирования описывается дифференциальным уравнением
laquo;o- f+ ?.5 + laquo;2 + ад = ЬоЯ(0. О)
Значения коэффициентов: laquo;0 = 0,1 сек, а, = 4,2 сек\ a{t) = (72-О,It) сек, йз = 400 и amp;о = 400. Оценить приближенно устойчивость системы, если время работы ее j= 100 сек.
Решение. Рассмотрим систему с замороженными коэффициентами при = 0 и при t = T = 100 сек. В этих случаях характеристическое уравнение, соответствующее исходному дифференциальному уравнению (I), будет
0,Ip3 + 4,2p2-f-72p-f-400 = 0, (2)
0,1рЗ + 4,2р2 + 62р-Ь400 = 0. (3)
Для уравнения (2) находим корни: р, = 10 сек , Р2-3 = ( -16 plusmn; / 12) сек~. Степень устойчивости t] = р, j = = 10 сек . Время переходного процесса 4 gt;= laquo;3ir = 0,3 сек.
Для уравнения (3) корни равны р, == - 25 сек , Р2-з = (-8,8 plusmn;/8,7) сек~Ч Степень устойчивости = = 8,8 сек . Время переходного процесса п lt;3т] = = 0,34 сек.
За время переходного процесса коэффициент laquo;2(0 изменяется на величину Да20,1 -0,34 = 0,034, что составляет приблизительно 0,05%. Следовательно, система может рассматриваться как квазистациоиарная. Оценка устойчивости может быть сделана по замороженным коэффициентам характеристического уравнения. Применяя критерий Гурвица, имеем
G,g2 (t) gt; йой.
Подстановка числовых значений дает 4,2 (72-О, И) gt; 40.
Последнее неравенство выполняется при любом вре-. мени, лежащем в пределах О100 сек. Следовательно, система устойчива.
a + bt + cfi 10 + 0,+0,01/2 а 10
Со (t)
(a + btctf ~ (И)+ 0,1Г+0,01/2)2 raquo;
СгС)- а 10
2 (a+bt + ctf, (10+0,U +0,02)
327. Объект регулирования совместно с исполнительным органом описывается дифференциальным
325. Дана весовая функция квазистационарной системы
w{t-- amp;, О) = е- laquo;
где Оо = 20 сек, а = 5 сек, t - текущее время, отсчитываемое от моменга включения системы, в -момент поступления входного импульса. Определить устойчивость системы.
Ответ. Нормальная весовая функция затухает и система является устойчивой в пределах времени 0 lt;во = 20 сек. При gt;во любое малоевозмущение на входе может вызвать неограниченное возрастание выходной величины.
326. Параметрическая передаточная функция замкнутой системы имеет вид
где й;=10 сек , ft = 0,1 сек~ и с = 0,01 сек~. Определить коэффициенты ошибки сЦ), C\(t) и СгСО-
Решение. Находим передаточную функцию замкнутой системы относительно ошибки:
Разлагая последнее выражение в ряд по степени оператора р, получаем
, Ы + сР ар ар
х\Р gt; Ч- a + bt + ct (a + bt + ctY (a + bt + ciY +
Отсюда можно определить коэффициенты ошибки
уравнением
(bo-\-b,t)x{t).
J,дg у регулируемая величина, х = g - y - ошибка, ст -входное воздействие,- amp;о=100 сек~ и amp;i = Q,I сек~. Считая систему квазистационарной, определить необходимые корректирующие устройства, чтобы в пределах времени работы системы 0 lt; lt; lt;1000 сек замкнутая система имела бы показатель колебательности, не превышающий значения Л1 = 1,5.
Задачу решить методод! замораживания коэффициентов.
Решение. Передаточная функция исходной разомкнутой системы с замороженным коэффициентом равна
bo + b,t.
Л. а, X. представляет собой прямую с наклоном -40 5б/йек (рис. 191). Базовая частота л. а. х. {Оо= V-
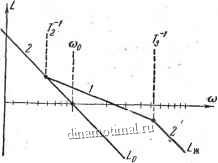
Рис. 191. л. а. x. к задаче 327.
Использовав л. а. х. типа 2-1 - 2 (см. приложение 19), получаем желаемую передаточную функцию разомкнутой системы
Р (i + т,р)
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 [ 101 ] 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 |




