 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Системы регулирования
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 [ 114 ] 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193
gt;
-V gt; gt; gt; l.A gt;vJ t.A gt;J
у.
Рис. 214. Следящая система с переменным демпфированием.
Местная обратная связь в этой системе образуется тахогенераторами ТГ\ и ГА, которые включены последовательно и встречно. Разность напряжений этих тахо-генераторов гц - щ складывается с. напряжением U\, снимаемым с чувствительного элемента. При большом угле рассогласования amp; напряжение щ gt; laquo;5, так как ток в обмотке возбуждения тахогенератора ТГ пропорционален углу Поэтому суммарный сигнал на входе усилителя У\ Ыг gt; laquo;ь что обеспечивает большую скорость нарастания процесса. При малом угле рассогласования laquo;4 lt; laquo;5 и напряжение на входе усилителя У( Ы2 lt; laquo;1. Поэтому система работает с пониженной скоростью, что исключает перерегулирование. При составлении уравнений системы статическим моментом нагрузки и влиянием переходных процессов в цепи якоря двигателя и в обмотке возбуждения тахогенератора ТГ% можно пренебречь. Усилители Vy и V% считаются без-инерционными.
Решение. Составляем дифференциальные уравнения звеньев системы.
1. Уравнение чувствительного элемента
Uy = kfi, в = в, -вг, (1)
рованием (рис. 214). На схеме обозначено: amp;1, amp;2--углы поворота командной и исполнительной осей, amp; - amp;,- - amp;2 - угол рассогласования (ошибка), ЧЭ - чувствительный элемент (датчик угла рассогласования), РМ - рабочий механизм, Уг - усилители, ТГу, ТГг - тахо-генераторы, Д -двигатель, Р- редуктор.
561 sect; Il.l. УРАВНЕНИЯ НЕЛИНЕЙНЫХ СЛЕДЯЩИХ СИСТЕМ 349
где й,-крутизна статической характеристики чувствительного элемента. . .
2. Уравнение усилителя У у
МЗ=Й2 laquo;2. laquo;2 = Mi+ laquo;4- laquo;5. (2)
где laquo;3 - напряжение на выходе усилителя, feg - коэффициент усиления.
3. Уравнение двигателя
(7 р-Ц)рдд = йзМз, (3)
где copy;д-угол поворота вала двигателя, Гц из-электромеханическая постоянная времени и коэффициент передачи двигателя.
1 lt;аР
Рис. 215. Структурная схема следящей системы с переменным демпфированием.
4. Уравнение цепи нелинейной обратной связи, состоящей из тахогенератора ТГ2 и усилителя У2,
laquo;4 = Й4Р laquo;1 amp;л, . (4)
где 4 -коэффициент пропорциональности.
5. Уравнение тахогенератора ТГ\
и = кр%, (5)
где fej- крутизна статической характеристики тахогенератора.
6. Уравнение редуктора
*2 = 6д. . (6)
где /ге -коэффициент передачи редуктора.
По уравнениям (1) -(6) составляем структурную схему системы (рис. 215). На этой схеме знаком ixi
обозначено множительное устройство, выполняющее операцию умножения двух переменных согласно уравнению (4).
В соответствии со структурной схемой нелинейное дифференциальное уравнение всей системы имеет вид
[Тр -К1 + feaMs) Р + kikskske] Ь -
- kikzkkip {bi - fl-j) laquo; г = kikikske amp;i. (7)
sect; 11.2. Уравнения нелинейных систем стабилизации
377. Составить дифференциальные уравнения и структурную схему системы автоматического регулирования температуры, схема которой изображена на рис. 216.
pff М р
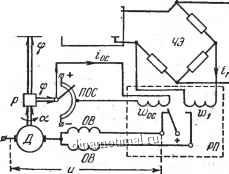
Рис. 216. Система автоматического регулиро вания температуры.
На схеме обозначено: ОР -объект регулирования, ЧЭ- чувствительный элемент (мост с термосопротивлением), РП - поляризованное реле (усилитель), Д.- двигатель, ОВ - обмотки возбуждения двигателя, Р - редуктор, РО - регулирующий орган (заслонка), ЯОС - потенциометр обратной связи.
Исходные данные: объект представляет собой апериодическое звено первого порядка с постоянной времени 7о = ГО сек, коэффициент передачи объекта и регулирующего органа йо=10 epudlpad, коэффнциент.передачи
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 [ 114 ] 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 |




