 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Системы регулирования
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 [ 119 ] 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193
На схеме обозначено: РО - регулируемый объект (ИСЗ), ЧЭх и /Эа - чувствительные элементы (датчики угла рассогласования О и угловой скорости Ь\ УО -управляющее устройство (совместно с исполнительным органом), Af - стабилизирующий момент со стороны исполнительного органа, laquo;1 и laquo;2 -напряжения на выходе чувствительных элементов. -d
Исходные данные: момент инер- 7 ции ИСЗ / = 5000 Г см сек, максимальное значение стабилизирующего момента Мо = 500 Г см, коэф- Статическая фициент передачи датчика угла характеристика чув-рассогласования ki = I в/град, коэф- ствительного элемента фициент передачи датчика угловой к задаче 385. скорости 2 = 1 е сек/град, щирина зоны нечувствительности управляющего устройства b ~ = 0,2 в, щирина зоны нечувствительности Э2(рис. 233) d = 0,\ граЗ/сек, временное запаздывание в управляющем устройстве т = 0,3 сек. Сопротивлением среды вращению ИСЗ можно пренебречь. lt; Рещение. Уравнение объекта запишем в виде
= -М.
Уравнение управляющего устройства
M = F{u), (2)
где f (и) - нелинейная функция, заданнаястатической характеристикой (см. рис. 232, б).
Суммарный сигнал на выходе чувствительных элементов ЧЭх и 2
U = Ui + U2 = kift + Fi{b), (3)
где f (О) - нелинейная функция, статическая характеристика которой изображена на рис. 233, В соответствии с рис. 233 выражение (3) можно записать в следующем виде:
fe,0 при IKrf,
fe,0-i-/j2(0-rf) при amp; gt;d, (4)
ki amp; + k2i + d) при 0 lt;-rf.
laquo; =
у, ерод/сеп
х.ерад
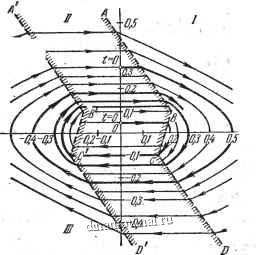
Рис. 234. Фазовые траектории системы стабилизации ИСЗ к задаче 385.
рис. 232, 6 Происходит при и = Л- Ъ и и=. - Ъ, или с учетом (4)
при \h\d.
0= -
*1 А;.
При gt; rf.
при - rf.
Переключение исполнительного устройства при отсутствии временного запаздывания (t = 0) согласно
sect; 12.1 МЕТОД ФАЗОВЫХ ТРАЕКТОРИИ
Если принять, что в течение времени т движение ИСЗ происходит с постоянной скоростью, и обозначить X = р, = условия переключения исполнительного органа можно записать в виде
+ гу = 0,2 + 0.3у.
-f- + T lt;/ = 0,2-0,3f,
при kl lt;rf = 0,l, (8)
k2 (y-d)
h{y-d) h
f тг/ = 0,3-0,7/.
k, +Tf/=-0,l-0,7 lt;/
b kAy plusmn;d)
b kAy plusmn; 4
i-xy = 0,l-0,7y.
при y gt;f/=0,l, (9) при y - d = = -0,1. (10)
I По формулам (8)-(10) на рис. 234 построены линии переключения (ломаные ABCD и ABCjy), которые разделяют фазовую плоскость на три области. Согласно (1), (2) и рис. 232, б уравнения всей системы будут равны
д. = ---- I -hTj/=-0,3-0,7ff
Mo J
+ - = 0,1
- 0,1 для области/,
для области , (II) для области /.
После замены х = amp;, y - -jf разделим уравнения (11) = у. Получим
у dy= - 0,1 dx для области /, dy = 0 для области ,
у dy= + 0,1 dx для области /,
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 [ 119 ] 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 |




