 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Системы регулирования
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 [ 148 ] 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193
dt ~
rflj)2
dt ~
О,
Интегрируя эти уравнения, по.1учим -
где Си Cz - постоянные интегрирования.
Чтобы наглядно- представить, как происходит переключение, изобразим процесс движения на фазовой плоскости.
Исключим из уравнений (2) dt. При этом для р = == plusmn;1 получим
X2dX2== plusmn; kdxi.
= plusmn; kXi-\- с.
Уравнениям (7) соответствуют параболы, симметричные относительно оси д;] (рис. 308,а). Спутник придет и бу-
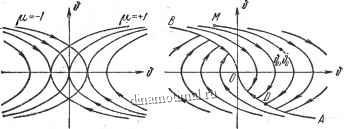
Рис. 308. Фазовые диаграммы углового движения спутника при ц plusmn;1 (а) и при оптимальном управлении (б).
дет оставаться в исходном положении, если изображающая точка на фазовой плоскости попадет в начало координат JCi = 00, Х2=-0.Для этого при произвольном начальном отклонении Ьй, Оо изображающая точка М
запишем [20]
sect; 17.1. принцип МАКСИМУМА
должна перейти сначала в точку D (рис. 308, б), а затем уже по линии переключения АО -в начальную точку.. Переход на траекторию АО достигается изменением знака управляющей функции р с laquo; - 1 raquo; на laquo;+Т raquo;.
Таким образом, управляющий сигнал ц должен менять знак при выходе изображающей точки на линию переключения. В соответствии с рис. 308, б
+ 1 при -аг lt;[-ж1 laquo; -ш- = Ы lt;0 - 1 при
df (df\ d (db\
Уравнение линии переключения находится из выражения (7) и рис. 308, б
(10)
Подставляя числовые значения, получим -t(1fL= - 0.2 sign
Следовательно, в регуляторе должно быть устройство, дифференцирующее ощибку amp; по времени и вычисляющее скорость [-j на линии переключения по формуле (10),~а также логическое-устройство, осуществляющее переключение реактивных двигателей на полную
Вычсслстель | |||
Логм- | |||
vecme истрои- | |||
Дцфсреренци- рующее дстроттбо | amp; | стоо | |
it
Рис. 309. Функциональная схема оптимального регулятора.
тягу по закону, выраженному формулами (8). Функциональная схема регулятора представлена на рис. 309.
Оптимальное время перехода спутника из заданного положения в нулевое может быть определено следую щим образом. Из уравнения (2) можно написать
at ~ dt
Поэтому db = k\idt. В результате интегрирования по лучаем
Ь-Ь.Ы-и). (II)
Поскольку переход совершается в два этапа и значения Ь в начале ( amp; = Йо = 28,65 град/сек) и в конце ( в2 = 0) заданы, то для вычисления времени на каждом этапе согласно выражению (II) необходимо найти = V. (13)
Со определим из начальных условий. Для этого предварительно преобразуем Йо и в радианную меру
amp;0 = 1 deg; 46 = 0,02 рад, amp;о = 28,65 град/сек = 0,5 секК Тогда для начальных условий имеем
Со = (0,02) + --= 0,129 раа.
Подстановка Со и k в (13) дает
ft, = ]АбД29 = 0,345 сек-.
Для расчета необходимо взять знак ( -), так как переключение происходит в области отрицательных значений Подставляя в (11), находим время движения на первом (Ai = i -/о) и втором (Д raquo;2 = 2 -i) участках
д/, = , /д = л я== л . = 42,з сек,
А/ / * *2-* 0,345 , о
Общее время Д = Д,--А2= 59,6 сек.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 [ 148 ] 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 |




