 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Системы регулирования
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 [ 181 ] 182 183 184 185 186 187 188 189 190 191 192 193
. ПРИЛОЖЕНИЕ
записываются в форме, совпадщей с (П.2) Xi = ЛгАГз + f (ff).
. laquo; , = Л ,а: ,+/(а),
о = Pi-v-i + P2Jf2 + ... +PnXn-rf{a), (ахп).
Но здесь где
г--(с, amp;,+ себ2+ ... +с 6р),
(fe=l, 2, .... я).
В формуле (П. 10)
Affc(,)= 2 6/0/*.(Я),
(П.8)
(П.9)
(П. 10)
! т.*
(П.И)
где Dik (Л) обозначает алгебраическое дополнеиие элемента i-ft строки и fe-ro столбца определителя D (Я).
В. Для уравнений нелинейной системы п-го порядка, ааданвых в виде
raquo;1 lt; - gt; +.я,11 lt; -=* + ... + ап-т = -dl, G = Coi(i + c\i] + C2n+ ... -S-Cn-sV -fl. (П-12)
r=f(ff),
канонические уравнения записываются в виде xi = Л,. , -1- / (а).
Xn-t = + f (о).
а = Р,л;, Р2 laquo;2 + ... + n~iKn~i~r[(a).
где Ль Я,2, .... -кории многочлена
/)(Я,) = Я, -+о,Я -2+а2Я-+ ... -Ь laquo;
А (Ял)
(А:=1. 2. .... п-1).
D(Kk) В форму.те (П.15)
А(Я) = Со-1-с,Я + е2Я-+ ... -l-c oЯ laquo;-
/?(Я)
D (Л).
(П.13)
(П.14) (П.15)
(П. 15)
550 . ПРИЛОЖЕНИЕ [24
Если в многочлене. (П.И) имеется один нулевой, корень, например, Я 1 = 0, то в выражении (П. 13)
(П.17)
а 2 где
24. Достаточные условия устойчивостинелинейных систем второго, третьего и четвертого порядков
Считаем, что нелинейная система содержит одно нелинейное ввепо, статическая характеристика которого .имеет любую форму, но она обязательно однозначная, нечетная и симметричная относи-.тельчо начала координат.
Производная от фрнкции Ляпунова будет знакоопределенной
для систем третьего порядка, уравдения которых приводятся к канонической форме (П.2), (П.8) или (П.13);
для систем четвертого порядка, уравнения которых приводятся к тон же форуме (П.2) или (П.13), но прн наличии одного нулевого корня в уравнении D(X) = 0;
для систем четвертого порядка с уравнениями типа (П.2), (П.8) или (П.13) без нулевого корня, но при условии, что одному из вещественных корней уравнения D (Я,) = О соответствует отрицательная постоянная Р; .
при выполнении условий
Г gt;0 при laquo;. gt;--L, (П.18)
Г gt;2/~= -К2 при copy; lt;-j, (П.19)
/ (Я,-Л2)+(Р,~р2) (К -К)
4Я Я,2
(П.21)
Для систем второго порядка, уравнения которых приводятся к- форме (П.7), справедливы условия (П.18) и (П.19) при г = 0, если в формулах (П.20) и (П.21) заменить р, н Р raquo; на vi и Va-
25. Переход от л. а. х. вида 20 lg 1 + W (J(u)\ к л. а. х. вида 20 Ig I W ( raquo; I (рис. 365, 366, 367)
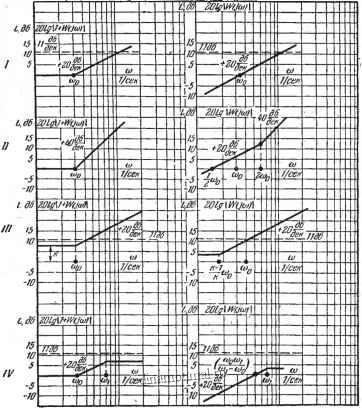
Рис. 365.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 [ 181 ] 182 183 184 185 186 187 188 189 190 191 192 193 |




