 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Системы регулирования
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 [ 72 ] 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193
где А -синфазная составляющая ошибки, lt;р -квадратурная составляющая ошибки. Фазовая ошибка
относительная амплитудная ошибка
1-1*2
Если считать, что при частоте модуль W(/(Ok) gt; I, то фазовую ошибку можно подсчитать по приближенной формуле
Imax
а относительную амплитудную ошибку -по формуле
* raquo;
Imax
-Imax
Imax
Задание величины фазовой и относительной амплитудной ошибок определяет предельное левое положение
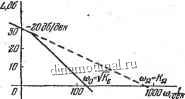
Рис. 145. а) Векторная диаграмма ошибок; б) низкочастотная часть желаемой л. а. х.
первой и второй асимптот л. а. х.:
Вид низкочастотной части желаемой л, а. х. показан на рис. 145, б.
269. Для замкнутой системы комбинированного управления определить уровни компенсирующих сигналов
по первой и второй производным от входного воздействия, при которых в системе, обладающей астатизмом первого порядка, устраняются скоростная ощибка и ошибка, зависящая от ускорения. Структурная схема замкнутой системы комбинированного управления приведена на рис. 146. Компенсирующие сигналы имеют
-ф(/)1 = (т,Р + т,Т2р2) .
где Т] - отношение крутизны сигнала по первой производной от 1 к крутизне сигнала по ошибке Tg - отношение крутизны сигнала по второй производной к кру тизне Сигнала по первой производной от
Рис. 146. Структурная схема следящей системы комбинированного управления.
Решение. В системе комбинированного управления выходная величина пропорциональна не только ошибке Ь, но и компенсирующему сигналу ф(р)1, т. е.
2= laquo;(/)1 + ф(р)*.].
где W (р) = - передаточная функция ра-
зомкнутой системы.
Ошибка в замкнутой системе равна
f. [1-(р)фЫ]0. ~ l+W{p)
Подставляя значения W{p) и ф(р), получим
[Т1Т2Р + (Г, + Гз - KaT.Tg) + (1 - Кат) р] д, TiT2P + (Ti + T2)p + p + Ka
При выполнении условия .. .
в системе устраняется скоростная ошибка.- При допол-нлтельном условии
ИЛИ . . .., .
обращается также в пуль ошибка, зависящая от уско raquo; рения.
Эквивалентная передаточная функция разомкнутой системы соответствует системе, имеющей астатизм третьего порядка:
117 W{p)li + (p)]
Ti-V + Cfi + T.,~KQXyX2)p + (l-KaX,)p
sect; 6,2. Алгебраические методы выбора параметров САР
270. Система регулирования напряжения с угольным регулятором (рис. 147) описывается уравнением третьего порядка
[(1 + 7 raquo; (1 + Г,/;) (I + Гг/;) + ад Ли =
= (-/ ,/;+1)(1+Г2/ gt;)/(4
где Го = 0,02 тс - постоянная времени - генератора (объекта регулирования), feo = 36 в/олг - коэффициент передачи генератора, Т\ - постоянная времени чувствительного элемента (обмотки электромагнита), постоянная времени регулятора (угольного столба), /г = = 0,405 ол/в -коэффициент передачи регулятора.
Выбрать варьируемые параметры системы регулирования Ти Гг так, чтобы обеспечить степень устойчивости ЛоО,4 при колебательной форме переходного процесса.
Решение. Обратимся к диаграмме Вышнеградского (приложения 7 и 8). Характеристическое уравнение
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 [ 72 ] 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 |




