 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Системы регулирования
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 [ 85 ] 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193
285. Произвести выбор параметров прямой парал-.нельной корректирующей связи для системы автоматического регулирования, структурная схема которой
4 lt;о gt;
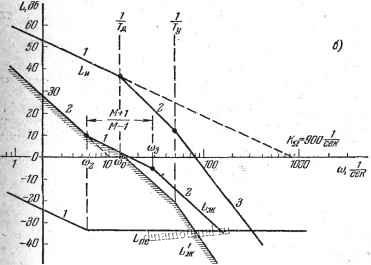
Рис. 169. а) Структурная схема системы с введением прямой параллельной корректирующей связи; б) л. а. х. к задаче 28.5.
показана на рис. 169, с. Передаточная функция разомкнутой исходной системы имеет вид
ь = = Ш- -nil
Отношение --- целесообразно выбрать равным
Отсюда
1;,=- = Ml laquo;,0,018. laquo;26
Для выполнения этого условия придется намеренно уменьшать коэффициент передачи первого звена, охватываемого прямой параллельной связью. Одновременно во столько же раз увеличивается коэффициент передачи другого звена, входящего в прямой тракт усиления, чтобы сохранить постоянной величину Ка-
Введением интегрирующей связи удается приблизить л. а. X. исходной системы L к желаемому виду Только в области низких и частично средних частот (L)-
где Ка = 00 сек-\ Гд = 0,08 сек, Гу = 0,02 сек. После введения прямой параллельной связи система должна обладать астатизмом второго порядка, иметь доброт ность по ускорению Ке = 100 сек~ и показатель колебательности Л1 1,5.
Решение. Передаточную функцию разомкнутой системы с учетом введения прямой параллельной связи представим в виде
Ке = Kaknc-
Реализация прямой связи, осуществляющей введение сигнала, пропорционального интегралу от ошибки (рассогласования), возможна путем использования интегрирующего привода.
На рис. 169, б изображены л. а. х. исходной системы L , желаемая л. а. х. и л. а. х. прямой связи /. с-
Требуемое значение коэффициента передачи по цепи прямой связи kac определяется из условия
. Окончательное приближение л, а. х, системы к желаемому виду может быть достигнуто путем коррекции л. а. X. системы в области средних и высших частот применением последовательных корректирующих звеньев либо с помощью эквивалентных им прямых или обратных связей.
sect; 6.5. Расчет систем комбинированного управления
286. Определить требуемый уровень компенсирующего сигнала по первой производной от входного воздействия, при котором устраняется скоростная ошибка системы
Щ(Р) Щр)
Рис. 170. Структурная схема системы комбинированного управления.
(рис. 170), звенья которой имеют следующие передаточные функции:
Ф (Р) ==т,/7,
где ki = 10 в/град, = 10 граЗ/сек, Т = 0,02 сек, т [сек] - коэффициент, определяющий уровень компенсирующего сигнала.
Решение. Передаточная функция замкнутой системы относительно ошибки имеет вид
1 - (р) ф (р)
ФАр)
откуда
1 + W, (р) (р)
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 [ 85 ] 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 |




