 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
[ 1 ] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
Электрические машины
Электропривод потребляет основную долю производимой в мире электроэнергии. Электростанции и линии передач, трансформаторные подстанции и системы управления строятся главным образом для того, чтобы питать электропривод. Правильное решение основных проблем развития электропривода имеет важное значение для экономики страны. Каждое новшество должно повысить эффективность действия оборудования - для промышленных устройств, в частности для промышленного электропривода, это понятие соответствует экономическому результату от введения нового типа оборудования для всего народного хозяйства. Необходимость именно такого подхода была давно ясна ведущим ученым-разработчикам новых видов оборудования.
Так, и М. О. Доливо-Добровольский, и М. Видмар призывали laquo;минимизировать не стоимость трансформатора, а стоимость трансформации raquo;. В предлагаемой читателю книге показано (гл. 1), что электромашиностроители умело и настойчиво проводят субоптимизацию своей прод gt;Кции: снижают металлоемкость, уменьшают габаритные размеры, снижают стоимость электрических машин - в основном за счет повышения частоты их вращения. Действительно, высокоскоростные машины имеют существенно лучшие массогабаритные показатели. Так, двигатель для привода рольгангов мощностью в 1 кВт при частоте вращения 200 об/мин всего лишь в 2,6 раза легче двигателя полезной мощностью в 160 кВт при 2955 об/мин. Но механизмы, для которых создается электропривод, чаще требуют существенно более низких частот вращения или скоростей перемещения.
Традиционным решением, применяемым для обеспечения низких частот вращения рабочих механизмов, является высокоскоростной двигатель с редуктором. Системный подход, анализ с позиции наибольшей эффективности для всего народного хозяйства приводит к выводу, что суммарная масса, габаритные размеры и стоимость при указанном традиционном решении двигателя и редуктора в достаточно большом классе применений весьма существенно отличаются от соответствующих параметров самих двигателей. Рассмотрение главной альтернативы - без-редукторных электроприводов (т. е. электродвигателей, непосредственно связанных с рабочим механизмом), являющееся основным содержанием книги, представляет, таким образом, существенный практический интерес.
Речь идет, конечно, не о laquo;ликвидации редукторов raquo; - это устройство полезное, и в ряде случаев незамени.мое - око достигло высоких степеней совершенства. Задача книги - обосно-
вать возможность существенного расширения областей применения безредукторного привода - низкоскоростных электродвигателей вращательного, поступательного и возвратно-поступательного типов, выявить его особенности, установить достигнутое и рассмотреть перспективы дальнейшего развития.
Задача создания безредукторного электродвигателя может быть решена при сохранении принципа laquo;движения приводящего и приводимого элемента в одной и той же координате raquo;. Это многополюсные машины с питанием от промышленной сети или источника пониженной частоты, машины с катящимся ротором, машины с питанием ротора и статора от источников с разной частотой, редукторные двигатели, машины, работающие на субгармониках MarHHjHoro поля, и аналогичные. Рассмотрению этих устройств посвящена гл. 2. Тот же вид движения используется и в получивших значительное развитие в последнее время линейных и дуговых двигателях. Их возможности и проблемы, характеристики и перспективы развития рассмотрены в гл. 3. Значительное внимание в книге уделено относительно новому принципу создания безредукторного электропривода с движением приводящего и приводимого в движение элементов во взаимно-перпендикулярных направлениях так называемых машин двойного движения, у которых ротор (или система роторов) совершает быстрое вращательное движение относительно статора, а статор, связанный непосредственно с рабочим элементом привода, медленное вращательное, поступательное или возвратно-поступательное движение. Своеобразие этих машин, их благоприятные энергетические и массогабаритные возможности, с одной стороны, и отсутствие основ их теории и расчета до настоящего времени, с другой стороны, обусловили значительный объем посвященной им гл. 4. Преодолевать трудности, связанные с охватом широкого круга вопросов, с изложением как принципиально новых идей и конструкций, так и системного рассмотрения технических и экономических вопросов существующих устройств автору помогли соратники, консультанты и благожелательные критики - д-р техн. наук, проф. Б. А. Ивоботенко и д-р техн.
наук, проф. П. Ю. Каасик, канд. техн. наук, ассистенты и инженеры
Р. И. Батырев , Л. А. Гирская , О. Н. Матеранска*
B. Б. Муляр, В. В. Ростовцев, М. А. Суханова, Е. Т. Чернов,
C. Н. Яловега, спасибо им. Автор также благодарит кафедрУ laquo;Электропривод raquo; МЭИ, которая рассмотрела рукопись и дала свои замечания, принятые автором с признательностью. Особая благодарность внимательному и терпеливому редактору этой книги Ю. М. Келиму. Автор заранее благодарит также читателей, которые пришлют свои замечания по адресу: 113114, Москва, M-Ui Шлюзовая наб, 10. Энергоатомиздат. Авто(
ГЛАВА 1
ЭЛЕКТРОДВИГАТЕЛЬ И ЭЛЕКТРОПРИВОД
1.1. ОСНОВНЫЕ ЗАДАЧИ ЭЛЕКТРОПРИВОДА И ЕГО СОСТАВНЫЕ ЧАСТИ
Основной задачей привода является обеспечение требуемого движения рабочего органа ( laquo;машины-орудия raquo;). Так, комплектное устройство электродвигатель с редуктором, обычно называемое электрическим исполнительным механизмом (рис. 1.1), является электроприводом связанного с выходным валом устройства рабочего органа, например задвижки, перекрывающей течение жидкости, пара или газа в технологическом процессе. Масса редуктора составляет примерно 80% от всей массы исполнительного механизма, габаритные размеры редуктора однозначно определяют собой размеры всего механизма. Соотношение объемов редуктора и двигателя не случайно. Частота вращения ротора электродвигателя 2400 об/мин, выходного вала механизма 0,6 об/мин; как будет показано ниже, значительные передаточные числа редукторов характерны для широкого класса приводов. Редуктор вносит в привод не только свою массу и объем, но и люфты, меняет упругий характер сочленений, момент инерции и другие параметры. А задачей электропривода является не просто приведение в движение рабочего органа и не только обеспечение при этом наиболее благоприятных энергетических и массогабаритных показателей, но и выполнение сложного комплекса условий, обеспечивающих требуемое качество этого движения: заданное ускорение при тро-гании с места или изменении установившейся скорости, точность выдерживания этой скорости, точность остановки и желательный характер переходного режима. Эти тре-
хтрический исполнительный механизм МЭО-63/25-0,25
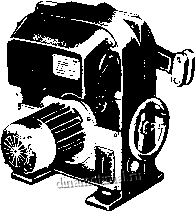
бования в определенной части противоречивы. Так, высокая скорость торможения обеспечивает малое время переходного процесса от установившейся скорости до остановки, но затруд- j няет точное осуществление заданного перемещения. Обеспечение больших ускорений входит в противоречие с получением высоких энергетических показателей. Поэтому составной частью электропривода, кроме электродвигателя и передаточного механизма, в большинстве случаев включающего редуктор, принято считать и систему управления, а также преобразователи и источники питания - не столько с точки зрения технического выполнения элементов этих устройств, сколько с точки зрения влияния принципов (способов) управления, положенных в основу указанной системы, на характеристики электропривода. В энциклопедии laquo;Автоматизация производства и промышленная электроника raquo; (М.: Советская энциклопедия, 1965. Т. 4. С. 413) автоматизированный электропривод определяется как laquo;машинное устройство, преобразующее электрическую энергию в механическую и обеспечивающее автоматическое управление преобразован1юй механической энергии raquo;.
Электропривод завоевывает все новые области применения. Так, если в 1976-1978 гг. электропривод составлял лишь 8 - 12% общего числа приводов промышленных роботов, то в 1980- 1981 гг. его доля достигла уже ЗО-32% и продолжает возрастать 21]. Это заставляет разработчиков пристально всматриваться в рациональные соотношения между двигателем и редуктором. При решении задачи минимизации массы модуля электропривода робота, включающего в себя электродвигатель и редуктор, в [36] вводятся понятия удельного номинального момента двигателя gt;-дв=Мш / д raquo; И редуктора V laquo;=peA / ред, где М и т - соответственно номинальный момент и масса двигателя; Мд и т -то же для редуктора. В [36] указывается, что для существующих электродвигателей и редукторов gt; 10А,д и принимается в качестве условия рациональности передаточное число редуктора / gt; (2,5-5) gt;рд / 1д . Возможно, что для определенного класса роботов данное соотношение рационально, но в целом такой подход никак нельзя признать универсальным: если для общности приводить моменты Мд и Мрд к одной и той же оси, то они равны друг другу и значение к / \, = т / т переменное. В большом числе приводов это соотношение никак не достигает 10 - оно может быть и намного меньше, что иллюстрирует, например, табл. 1.1 для весьма малых мощностей. Но и для больших мощностей указанное соотношение бывает существенно меньше 1; так, у эскалатора метро т = 0,8 т; лПр =18 т; у цилиндрической мельницы МБ70-23 тд,= 10,25 т; т=48 т (без оконечной пары массой 18,5 т).
Для оценки возможностей общего подхода, предусматривающего рассмотрение электрической машины исходя из ее основных
Таблица 1.1. Исполнительные механизмы
Тип. механизма | Масса, кг | |||
всего механизма | редуктора | электродвигателя /Пд, | . д./ raquo;р | |
МЭО-1()/25-0,25 МЭО-25/25-0,25 МЭО-63/25-0,25-68 МЭО-6.?/2.5-0,25К-68 МЭО-160/25-0,25 МЭО-160/25-(),25К | 26 30 95 90 185 155 | 21 21 77 77 140 140 | 1,5* 5,8* 11,0* 4,.?** 30,0* 4,.3* raquo; | 0,07 0,276 0,143 0,056 0,215 0,03 |
* Двигатель типа ДА У изготавливается малыми сериями. Двигатель единой серии 4А.
Редуктор имеет 5 пар шестерен и передаточное число у механизмов с индексом к - 2100, у остальных механизмов - 4100.
физических возможностей, исследуем машину постоянного тока, ДЛЯ которой ряд массогабаритных соотношений детально изучен.
Направленное по касательной к окружности якоря усилие на единицу площади поверхности якоря (в Н/м )
F = aiB,A, (1.1)
где laquo;, - отношение расчетной полюсной дуги к полюсному делению т; B,s - индукция в зазоре, Тл; А - линейная нагрузка якоря, А/м.
Величина усилия
FFlnrl, (1.2)
где г - радиус якоря; / - расчетная длина якоря. Момент, Н-м, -
М = Fr = FlnrH. (1.3)
Объем якоря (обычно ротора)
(1.4) (1.5)
где V,
Масса ротора
/Ир = У,рЛГ%
средняя плотность массы якоря, кг/м1
лр!,! характеристика использования машины - отношение
1СНТа, Deaли чvfдг gt;rг gt; uQ n.- gt;D ,--------
массе якоря
-----....... ...ж/лхос/оанил МЙШИ
момента, реализуемого на поверхности якоря, к массе якоря равно удвоенному отношению средней плотности усилия к средней плотности массы и инвариантно относительно размеров якоря:
M/mp = 2F7Ycp- (1-6)
Плотность усилия F у машины крупногабаритной (низкоско-ростной) обычно выше, чем у малой (высокоскоростной); средняя плотность Ycpi наоборот, несколько ниже у крупногабаритной
| [ 1 ] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




