 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
сти raquo;: средняя линейная скорость конца рабочего инструмента 370 мм/с; максимальное ускорение конца рабочего инструмента 1540 мм/с; усилие трогания ненагруженного манипуляторд 0,07 Н; масштабность в передаче усилия 1 : 1,7.
Приведем в заключение табл. 2.7, наглядно иллюстрирующую технико-экономическую эффективность применения в манипуля. торах новых типов дистанционных передач [70].
Для ранее применявшейся следящей схемы манипулятора МЭМ-10В интенсивность отказов в целом
Л = А,л = 2931/ч,
где т - число групп однотипных элементов; п, - число элементов в группах. Среднее время работы схемы Гр = 1/Л = 340 ч.
Время безотказной работы с вероятностью Р = 0,9 Г = 34 ч Для следящей схемы с совмещенным сельсином-двигателем
МЭМ-10СД А = X i = 378 I0- 1/ч, Т = 2640 ч, Г = 264
при Р = 0,9.
Таблица 2.7. Основные устройства следящей системы манипуляторов
(на один комплект - 2 laquo;рукн raquo;)
Наименование
Обычная схема
Электродви гатель Электромашинный усилитель Электронный усилитель в том числе; лампа диод
транзистор сопротивление
raquo;
конденсатор
Сельсин
Тахогенератор
Двигатель
Преобразователь
Новая схема
Сельсин
Совмещенный сельсин-двигатель Электромагнитный тормоз
Манипулятор МЭМ-10В ДВ-200Т ЭМУ-5Л-П
6НШ Д226
МЛТ-0,5 СПО-2 КСО-2 КБГИ КЭ-2 МБГИ-2 МБМ КС-3 КС-4 ДГ-1Т АДП-123Б АЛА-1,5
Манипулятор МЭМ-ЮС Д НД-521 СДС-ЗМ
Цена I шт., руб.
200 . | |
25 | |
количество, шт.
20 20
40 160 60 400 100 20 60 20 40 60 20 20 12 2 1
Надежность следящей схемы манипулятора МЭМ-ЮСД выше, у МЭМ-ЮВ, в 7,8 раза.
общая стоимость основных устройств следящей схемы j3M-10B 17 832 руб., МЭМ-ЮСД - 3322 руб. С учетом изменения объема стендов управления и облегчения всей конструкции снижение стоимости на один комплект составило примерно 30 тыс. руб.
Указанные манипуляторы выполнены на базе СДС - машины с полым ротором и редуктором, но приведенный выше вывод о меньших значениях постоянной времени Т у больших машин с меньшим произведением MtJ/M и рассмотренные в гл. 1 соображения о массогабаритных соотношениях безредукторного и редукторного приводов позволяют считать перспективным разработку манипулятора сельсинного типа с безредукторным приводом в виде многополюсных СДС с полым ротором.
Перспективным электромеханическим приводом роботов-манипуляторов следует считать привод с непосредственным линейным перемещением, в котором использован линейный вариант машины двойного движения; ряд преимуществ этого привода в сравнении с гидравлическим, электрогидравлическим, электромагнитным и другими приводами показан в sect; 4. 3.
2.3. ЭЛЕКТРИЧЕСКАЯ МАШИНА С КАТЯЩИМСЯ РОТОРОМ
Одним из интересных способов решения задачи электрической редукции являются так называемые электрические машины с катящимся ротором. Имеется значительное количество работ по этим машинам - начиная с авторского свидетельства А. И. Москвитина [47] и его статьи [48]; ряд изданий перечислен в монографии [7].
Конструктивная схема электродвигателя с катящимся ротором (ДКР) приведена на рис. 2.15. Ротор ДКР расположен эксцентрически в расточке статора / и опирается прикрепленными к нему катками 2 на конические направляющие статора; при этом между поверхностями ротора и расточки статора сохраняется некоторый минимальный зазор. Ротор состоит из торцевых магнитопроводов 3 и цилиндрического магнита 4, намагниченного в осевом направлении и создающего униполярный постоянный поток в машине.
В соответствии с особенностью конструкции ДКР ротор является несбалансированной массой, которая при своем движении сообщает колебательные движения электродвигателю. Для уменьшения Рации на выходном валу статор ДКР крепится к фланцу с помощью эластичной подвески 6.
татор / имеет шесть П-образных шихтованных пакетов с ка-ками 5, залитых эпоксидным компаундом и образующих моно-исп deg; конструкцию. Обмотка статора двухполюсная и может ользоваться при двух- и трехфазном питании.
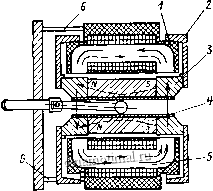
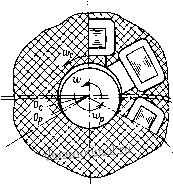
Рис. 2.15. Схема машины с катящимся ротором
Если включить обмотку статора на переменное напряжение то в эксцентрическом воздушном зазоре произойдет сложение по лей. Поскольку магнитная система несимметрична, появится ре зультирующая сила одностороннего магнитного притяжения, векто которой будет вращаться синхронно со скоростью вращения пол1 обмотки якоря.
Ввиду того что сила магнитного притяжения изменяет во вре мени свое положение относительно минимального зазора, роте начинает перемещаться в расточке статора. При этом синхрон raquo; с полем перемещается по расточке и точка касания на поверх ностях обкатывания; с той же скоростью о), ось ротора вра щается относительно оси расточки статора О.
Вместе с относительно быстрым обкатыванием система ро тор - катки медленно поворачивается вокруг своей оси в ту raquo; сторону. Это вращение является рабочим и передается на ъыШ ной вал 7 с помощью передачи насосного вращения 8. Переме щение laquo;точки касания raquo; есть перемещение оси постоянного поток ( laquo;оси полюса raquo;) -она проходит за один оборот nD. Ось врашг ния магнитного потока проходит при этом вокруг поверхнос ротора л Dp. Для того чтобы между ними сохранился неизменнь raquo; для синхронной машины при данной нагрузке угол О, ротор 0 жен отставать при этом на отрезок дуги своей окружности
aZ)p/2= лД - лОр, (2.1
или на угол
а = 2я-
(2.1
При синхронной скорости поля со ротор должен вращать*-в обратном направлении с угловой скоростью 58
(02 = to, = 0),
(2.18)
(2.19)
где Д - диаметр катка; Z gt; - диаметр направляющей; / = -д/(Д - Д) - редукция синхронной скорости.
Как следует из приведенных выражений, редукция определяется соотношением диаметров поверхностей обкатывания и может быть довольно большой.
Практически ДКР целесообразно выполнить на частоте вращения 5-100 об/мин при частоте сети = 50 Гц.
Поверхности обкатывания электродвигателя могут быть выполнены как гладкими (показаны на рис. 2.15), так и зубчатыми. В первом случае механическая характеристика ДКР будет относительно мягкой (рис. 2.16, а) вследствие механического проскальзывания на поверхностях обкатывания, во втором - жесткая (синхронная) (рис. 2.16, б).
Достоинства ДКР:
1. Тихоходность двигателя и отсутствие редуктора.
2. Малоинерционность (практически во всем диапазоне мощности). Время разгона и выбега не превышает 0,01 с, время реверса около 0,015 с при / = 50 Гц.
3. Развивает большой тормозной момент при отключении питающей сети; тормозной момент примерно вдвое превышает номинальный.
4. Относительно малая кратность пускового тока при большом тормозном моменте.
5. Отсутствие подвижных электрических контактов.
6. Относительно высокие энергетические показатели.
7. Возможность использования в шаговом режиме с большой точностью отработки малых шагов (порядка 1000 и более шагов на оборот).
У 8. Отсутствие необходимости в применении ограничительных -строиств и концевых выключателей, поскольку при перегрузках
Ики!? Механические характерис-зщины с катящимся ротором
5 5
4 to
I
I I
rS 00
ov -*
00 00
rO го
о -* о
о gt;л о г-m -* gt;л JO V) 1л m m
lt;s ю fo
oo -c
a. 00
025;
oo 00 vo
о о m r\m о о о о о
vo * 00
* о 00 :
f- 00
х-гоо
г- lt;s m
vo vo 00
00 -* 00 laquo;
1Л 1Л * -
- m 00 ov, oo r-
laquo;1
0, lt;
ft. К
о о I о о I
f. ov р* о о
г5 - m го
о о о о о
irt 1Л 1Л lt;л lt;л
о, lt;
amp;1
О. ш
о о.
lt; а!.
gt;s
,s==
lt;
И заклинивании привода обмотка ДКР практически не подвергается риску повреждения от перегрева.
9. Возможность получения синхронной (жесткой) механической характеристики.
10. Возможность использования в системах синхронного и синфазного валов.
В настоящее время электродвигатели с катящимся ротором находят применение в различных автоматических и полуавтоматических установках, программных и управляемых механизмах, следящих и телеуправляемых системах.
ДКР применяется для привода дозаторов, клапанов, задвижек и регулирующих вентилей.
Благодаря малоинерцион-ности ДКР находит применение в точных механизмах: для приводов нониусов копировальных станков; для намотки реохордов, потенциометров; в часовых механизмах; в различных системах телеметрического управления, например для привода laquo;механических рук raquo; при точных манипуляциях с радиоактивными продуктами. Двигатель устанавливается непосредственно для привода рукояток управления различных машин, движков реостатов и потенциометров, подвижных стрелок контроля.
В табл. 2.8 приводятся данные (в основном из [7]) -о выпускаемых в различных странах ДКР в сравнении с некоторыми другими электроприводами близкой мощности.
| 1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




