 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 [ 15 ] 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
Бирмингема (Великобритания) действует транспортная установка с магнитным подвесом, разработанная BR Research и изготовлец пая совместно фирмами GEC, Brush, Metro Camel и др. Эх, установка питается от инвертора, имеет максимальную тягу 4 скорость 54 км/ч, т] cos(p=0,22. Три установки с ЛАД и магнит, ньш подвесом изготовлены в Японии. Две из них высокоскоро, стные (100 и 300 км/ч), третья использовалась на Экспо-85 для перевозки пассажиров (по 48 в вагоне) со скоростью 30 км/ч В ФРГ ведутся работы по синхронному ЛД (ЛСД); с 1973 г ведется разработка ЛСД с магнитным подвесом и с возбуждением от постоянных магнитов (испытательный центр в Браунштейне) Аналогичный транспорт с ЛСД разрабатывается с 1979 г. в Эмс ланде. Проект предусматривает изготовление пути длиной 31 щ Опытный образец вагона Transrapid-Об имеет длину 54,2 м, вес 122 т (на 192 пассажира), возбуждение от электромагнитов. Транспорт с ЛСД разработан в Японии. Здесь предусматривается электродинамический подвес с использованием сверхпроводников. Основные работы по транспортным ЛД сейчас сосредоточены в ФРГ и Японии. Для высокоскоростного транспорта более перспективными считаются ЛСД, для малых скоростей ЛАД. Но, как уже указывалось выше, при малых скоростях у ЛАД весьма низкие энергетические и массогабаритные показатели.
Подробный анализ затруднений, реально возникающих при попытках использования ЛАД, дан на примере их применения в качестве электропривода подъемно-транспортных машин в [491 Указано на принципиальные преимущества такого безредукторного электропривода: из кинематической схемы исключается редуктор, а усилие передается непосредственно на рабочие органы машины (раму тележки, тяговый орган и т. д.), имеется принципиальная возможность полного устранения механической связи между устройствами для перемещения груза и направж-ющими, тяговое усилие может быть равномерно распределено вдоль всей кинематической цепи; ленты и металлические конструкции оказываются принципиально осуществимыми в кон струкции подъемно-транспортных машин с непосредственны raquo; силовым воздействием на канаты, стрелки, тележки, кабины, тоР мозные колодки и т. д. Но автор [49] на основе большое материала экспериментальных проверок, изучения опыта расчетг и конструирования ЛАД у нас в стране и за рубежом весьМ сдержанно отзывается о возможностях их широкого применения во всяком случае в рассматриваемой области техники. В качеств* основного препятствия отмечается тот факт, что при констрУ тивно достижимых размерах полюсного деления электродвигат ля, питании его от сети трехфазного тока 50 Гц и сохранен приемлемых энергетических показателей до сих пор не удал достигнуть нужной скорости перемещения грузов (2-3 м/* Снижение скорости даже до 5 м/с (что требуется иногда Д 84 j
онвейеров и передвижения тележек перегружателей) возможно дйШЬ при использовании преобразователей частоты, стоимость которых в несколько раз превышает стоимость традиционного электропривода и снимаемых частей механизмов, а увеличение цйсла элементов привода снижает надежность. Нелегко обеспе-цить сохранение достаточно малых воздушных зазоров между аддукторами и реактивной шиной и надежно устранить зацепле-jj[jg между ними. Приводятся данные испытаний во Всесоюзном научно-исследовательском институте подъемно-транспортного машиностроения тележечного конвейера с линейным асинхронным двигателем, изготовленным в Киевском политехническом институте и использующем два индуктора и вертикальные алюминиевые щйНЫ. Испытания проводились при частоте 20 и 50 Гц. Из-за большого скольжения (примерно 0,6-0,7 уже при /=20 Гц) рй нагрузке 1270-1570 Н были получены скорости 0,9-2 м/с, КПД снижался до 0,1,3, со5ф= 0,33-i-0,49 т. е. энергетический фактор был примерно 0,06. Автор делает вывод о целесообразности ориентировать применение ЛАД для приводов, предназначенных для кратковременной работы с большими перерывами, для таких приводов, где низкие энергетические показатели не имеют большого значения, например для управления тормозами (вместо электрогидротолкателей и т. п.), перевода стрелок, открывания и закрывания заслонок бункеров и др. В гл. 4 будет показано, что для решения как этих частных задач, так и более общих, определенные преимущества перед ЛАД имеют машины двойного движения поступательного типа и преобразователи движения. Выше показана рациональность введения короткозамкнутых контуров во вторичную часть ЛАД. По исследованиям, проведенным проф. В. А. Винокуровым и др., дальнейшее улучшение параметров ЛАД возможно при введении в эти контуры компенсирующих емкостей [14]. В этой работе приведены результаты анализа обращенного варианта ЛАД с размещением реактивной шины на экипаже для разного числа N экипажей на участке и разной длины 1 участка. Можно указать, что лучшие показатели имеет ЛАД с большей длиной реактивной шины. Отмечается, что приведенные в табл. 3.5 показатели для двигателя с фазной реактивной шиной и включением конденсаторов во вторичную цепь получены для конкретных значений вторичных параметров, что
позволяет сделать полное заключение об их возможных оптимальных значениях. Существенное влияние оказывает интенсификация охлаждения, позволяющая улучшить массогабаритные показатели за счет повышения плотности тока: в [14] показано, То при повышении Л с 5 до 20 А/мм т снижается в 1,5 раза.
При достаточно протяженной вторичной части ЛАД рекомен-J в [14] введение в обмотку машины компенсирующих Костей технически не очень просто выполнить. Здесь суще-нным было бы использовать возможность расположения на
экипаже как первичной, так и вторичной обмоток ЛАД, ц. предлагалось в [71] и [104] для вращающихся электрически машин. Приведем некоторые данные из [104], где показывается что индукторный асинхронный двигатель (сокращенно И АД) щ сравнению с обычным асинхронным двигателем с короткозамкну. тым ротором обладает рядом существенных преимуществ, , числу которых следует отнести: а) возможность управлени, двигателем путем изменения параметров вторичной цепи бе;, использования щеток и колец; б) большие возможности увели-чения числа пар полюсов, что позволяет рассчитывать эти дви. гатели на питание от источников высокой частоты или на малую синхронную частоту вращения при обычной частоте питания.
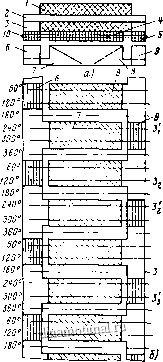
Представляет определенный интерес рассмотрение линейного асинхронного двигателя с сосредоточенными первичными обмотками и расположенными вдоль пути ферромагнитным рельсом или полосой [71]. Для повышения надежности, введения возможности регулирования скорости и момента, существенного уменьшения вредных краевых эффектов и снижения расхода токопроводящих материалов магнитопроводы, располагаемые вдоль пути, выполняются переменно-полюсными, а фазные обмотки статора укреплены на тележке со смещением относительно друг друга приблизительно на 90 deg; - для двухфазной, 120 deg; -для трехфазной и вообще на 360 deg;/m - для машины с любым числом фаз т, больших двух. За 360 deg; принимается расстояние вдоль пути, соответствующее расстоянию между осями одноименных полюсов магнитопровода пути. Вторичная обмотка располагается в пакетах стали упомянутых фаз на тележке и соединяется всех фазах последовательно.
На рис. 3.11, а представлен продольный разрез машины трехфазном исполнении. Магнитный поток, возникающий при подаче питания в обмотку возбуждения /, проходит по ма! иито
Таблица 3.5. Энергетические показатели обращенного варианта ЛАД
Число экипа- | г при (, равной | cos (р при | Л МВт | |||
жей N | I км | 2,5 км | 5 км | 1 км | ||
0,0926 | 0,0394 | 0,02 | 0,01.35 | 21,59 | ||
0,21 | 0,097 | 0,0543 | 0,0555 | 9,52 | ||
0,25 | 0,125 | 0,075 | 0,72 | |||
0,331 | 0,1685 | 0,093 | и,0158 | 30,21 | ||
0,552 | 0,343 | 0,21 | 0,065 | 18,11 | ||
0,61 | 0,37 | 0,25 | 0,083 | |||
0,488 | 0,285 | 0,1685 | 0,0188 | 40,98 | ||
0,692 | 0,501 | 0,343 | 0,0165 | 28,9 | ||
0,74 | 0,562 | 0,385 | 0,092 | |||
е, мвА(р:
1600 171,2
1912 278,7
2,-2,-22-22j-2J -
i, 5,1,9,
I раза
П фаза
Щщаъа
Рис. 3.11. Линейная асинхронная машина с расположением первичной и вторичной обмоток на подвижной тележке
проводу 2 в левую часть статора 3, через воздушный зазор попадает в левый полюс пути 6, затем - в соединенный с ним средний полюс 7, снова через воздушный зазор попадает в среднюю часть статора 4, из нее через воздушный зазор в другой средний полюс пути 8, соединенный с ним правый полюс пути 9 п снова через воздушный зазор проходит в правую часть статора -5 и замыкается через магнитопровод статора 2, четыре раза пересекая вторичную обмотку 10. В других фазах магнитный поток проходит тот же путь.
взаимодействие магнитного потока с током, возникающим в аторных обмотках, создает тяговое усилие, заставляющее те- двигаться.
g На Рис. 3.11, б представлен вид сверху магнитопроводов пути, рэтом варианте магнитопроводы пути не связаны магнитно с ьсами, и их размеры зависят только от конструкции машины.
На рис. 3.11, в дана схема выведения статорных вторичных моток на пускорегулирующие реостаты. На рис. 3.11, г приведе) схема статорных вторичных обмоток. По-видимому, в и, amp;щ удешевления магнитопроводы пути практически могут выполнят ся нешихтованными. Как для этого варианта, так и для дру машин с безобмоточными полюсами на пути представляет такд интерес использование для путевых магнитопроводов соответс! вующих пресс-порошков.
В качестве левой и правой частей магнитопроводов пути мод. но использовать существующие рельсы. В этом случае вторична; обмотка на тележке будет занимать только среднюю часть ста тора, а рабочая часть магнитопроводов пути будет представляв собой переменно-полюсную структуру, левая часть которой маг. нитно связана с левым рельсом, а правая часть - с правьц рельсом аналогично структуре на рис. 3.11, б.
Выполнение магнитопроводов по рис. 3.11 и наличие возмо raquo; ности переключения вторичных проводов на тележке и смещенш статора поперек тележки позволяют также (при различном со .четании поднятых и опущенных участков левой и правой частег полюсов пути) получить эффект изменения числа полюсов.
Такую машину можно использовать в генераторном ил( тормозном режиме, но особенно ценным представляется исполь .зование ее в качестве двигателя для тяги при однофазном пита НИИ и обеспечении временного сдвига фаз с помощью известньв высоковольтных фазосдвигающих устройств, так как сосредото ченные обмотки преддагаемой машины можно выполнить пра ктически на любое напряжение, в том числе в кожухе с транс форматорным маслом. Следует отметить, что выполнение путево; структуры по рис. 3.11,6 позволяет взаимодействовать с ней а первичным системам синхронного (в том числе автосинхроннон постоянного тока) типа, так и первичным системам асинхронногс типа. Это обстоятельство может существенно удешевить рабои на этапах отработки, сравнения в эксплуатационных условиях выбора окончательного варианта или вариантов систем линейно го электропривода, особенно для тяги на железнодорожн raquo;* транспорте. Выполнение обмоток индуктора сосредоточенны raquo; позволит существенно повысить их надежность.
В качестве существенно улучшенного варианта линейноп асинхронного двигателя в [59] рассматривается так называемы линейный двигатель Жана Гембаля с V-образной двухслойно реактивной шиной / (рис. 3.12), охватывающей индуктор 2, токопроводящим экраном 3, служащим также для
креплеий laquo;
индуктора. Сравнительные испытания этого двигателя провоД* лись Научно-исследовательским институтом транспорта в Витр (Франция) на круглом стенде. При скорости 180 км/ч и воздУ ном зазоре 20 мм измерения произведения Т1С05ф дали следуК)! результаты: 0,19 для двигателя фирмы laquo;Эрликон raquo; с двухслойнь!
якорем (т) = 0,77; со8ф=0,25); 0,22 для двигателя фирмы laquo;Же-joH-Шнейдер raquo; со стальным якорем (т) = 0,34; со8ф=0,б5); 0,50 двигателя Гембаля с двухслойным V-образным якорем (1,0,70; со8ф=0,71).
Наряду с этим отмечается наличие очень больших плотностей тока у двигателя Гембаля при обычных плотностях тока у двух других двигателей.
Полученные результаты представляются закономерными - больший охват индуктора и экранирование значительной части его потока рассеяния должны были улучшить энергетические показатели машины. Но именно этот принцип выполнения лишает возможности использовать машину на существующих линиях железнодорожного транспорта, где установка двухсторонней и тем более цилиндрической конструкции ЛАД не позволяет пропускать обычный подвижной состав.
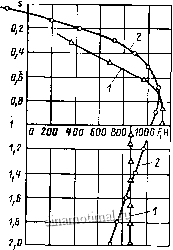
Практическая значимость возможного использования с минимальными переделками существующего верхнего строения пути железных дорог привела к другому крайнему решению - вообще не делать специальной реактивной шины, использовав для этой цели существующие железнодорожные рельсы [18]. В Киевском политехническом институте разработан и в Киевском ОКБ ЛД изготовлен такой рельсовый линейный асинхронный двигатель РеЛАД. Для проведения полигонных испытаний тележка с двигателями была оборудована двумя токоприемниками, применяемыми в метро, а на все ходовые колеса поставлены щеточные контакты. Двухфазное питание подводилось по контактным рельсам, расположенным по обе стороны от ходовых, а однофазное - по обоим ходовым рельсам.
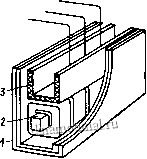
Рис. 3.12. Схема двигателя Гембаля
Рис. 3.13. Механическая характеристика ЛАД: - экспериментальная; 2 - расчетная
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 [ 15 ] 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




