 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 [ 19 ] 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 
Рис. 3.30. Гомополярная линейна синхронная машина
возбуждения 5 и лобовых частей катушек статора. Каждая цз вторичных катушек занимает зону в 120 deg;, а наивыгоднейшая дуга полуколец ротора составляет 0,55 2т ~ 200 deg;. Поток, вхо. дящий во внутреннюю поверхность сердечника статора, больще чем вдвое превышает поток, который можно было бы ввести во внутреннюю поверхность сердечника при обычной двухполюсной конструкции, так как кроме сечения, которое занималось обоими полюсами, используется еще и сечение немагнитной прослойки между ними. У такой конструкции ао = аь и переменная составляющая потока примерно равна половине полного потока, а синхронизирующий момент пропорционален 0,5 та, sinO (где т - число модулирующих фаз). При т-3 момент пропорционален l,5aisin9. Статор и тороиды технологически выполняются аналогично соответствующим элементам обычного бесконтактного сельсина.
Сравним с этой машиной (при питании ее обмотки возбуждения постоянным током и обмотки синхронизации трехфазным переменным током) линейный синхронный двигатель с униполярным возбуждением (или гомополярный), показанный на рис. 3.30. Полюсы / путевой структуры (ротора) могут также занимать 200 deg; и более. Поток в эти полюсы (между их осями 360 deg; или 2т) поступает из ярма 2 магнитной системы обмотки возбуждения 3 через листы пакета статора 4 и рабочий зазор-совершенно аналогично тому, как это происходит в правой части однополюсного бесконтактного сельсина, рассмотренного выше. Если бы у этого сельсина в левой части тороида была предусмотрена обмотка (как это сделано, например, у разбираемых ниже сельсинов), аналогия была бы полной.
Конкретной конструкции рассмотренного выше однополюсного бесконтактного сельсина (см. рис. 3.29) точнее соответствует односторонний вариант конструкции гомополярного синхронног
пппппппппп
Рис. 3.31. Односторонний вариант гомополярной линейной синхронной 108

Рис. 3.32. Линейный синхронный двигатель с магнитной редукцией
cos | ||||
-0,5 | ||||
-450 | - 90 | -0, S | -0,45 | |
- 80 | -0, | -0,1 | ||
-350 | - 70 | -0,35 | -0,35 | |
-300 | - 60 | -0,3 | -0,3 | |
-250 | - 50 | -0,Z5 | -0,25 | |
-г00 | - 0 | -0,1 | -0,2 | |
-150 | - 30 | -0,15 | -0,15 | |
-too | - 20 | -0,1 | ||
- 50 | - to | -0,05 | -0,05 | |
- 0 |
too zoo 300 H
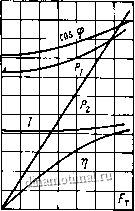
рис. 3.33. Рабочие характеристики линейного синхронного двигателя с магнитной редукцией
линейного двигателя, конструктивная схема которого представлена на рис. 3.31. Магнитный поток, создаваемый обмоткой 3, из ярма 2 справа проходит через листы статора 4 и рабочий зазор в полюсы / путевой структуры, аналогичные полюсам двусторонней конструкции на рис. 3.31, и, пройдя поперек пути в непрерывную полосу 5, замыкается в ярме 2 аналогично замыканию потока через аксиальный пакет ротора и тороид у рассмотренного выше однополюсного сельсина.
На рис. 3.32 показан поперечный разрез макетного образца тихоходного линейного синхронного двигателя с магнитной редукцией [11]. Подвижная часть двигателя состоит из стального П-образного магнитопровода с обмоткой возбуждения, создающей униполярный магнитный поток, и двух пакетов из электротехнической стали, в открытые пазы которых уложена трехфазная обмотка, создающая вдоль воздушного зазора бегущее магнитное Поле. Вторичный элемент представляет собой неподвижно за-Репленный пакет из электротехнической стали, выполненный открытыми пазами. Фиксирование зазора между неподвижной Подвижной частями осуществляется направляющими роликами, установленными на первичном элементе. Взаимодействие униполярного магнитного потока, который замыкается через воз-ДУШные зазоры, пакеты якоря, магнитопровод и вторичный эле-ент, с токами якоря при определенных геометрических соотно-ниях обеспечивает линейное движение с требуемой скоростью.
Макетный образец имел следующие данные: напряжение оря и=ЗЬ В; ток якоря 4=8,5 А; ток возбуждения 4=1 А;
тота /=50 Гц; скорость подвижной части v - 0,3 м/с; мак-
симальное усилие тяги /тшах= 330. Н; удельное тяговое усилие F/S=\,2 H/cм; полюсное деление якорной обмотки ?[ = 0,039 мм; ход подвижной части S = 0,6 м; масса подвижно части G = 18 кг.
Двигатель предназначен для длительного режима работы естественным охлаждением.
На рис. 3.33 приведены рабочие характеристики: I - f (F ) P\=f(F,); cos i-=/(F,); t] = f(FJ для номинальной скоро. сти движения подвижной части двигателя v = 0,3 м/с.
Интересный вариант линейного автосинхронного двигателя дает laquo;развертывание в линию raquo; однофазного, бесколлекторного электродвигателя, предложенного в 1966 г. [70] и запатентованного в основных промышленно развитых странах мира [89] [90], 191].
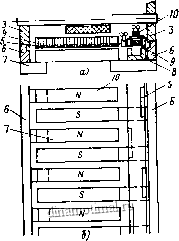
Линейная модификация этого двигателя показана на рис. 3.34 (а - поперечный разрез; б - вид сверху полюсной системы).
Двигатель имеет обмотку возбуждения 2, укрепленную на магнитопроводе 2, которым в данном случае, например, является ось колесной пары и колеса 3 движущейся тележки. На тележке также укреплен развернутый статор 4 с обмоткой 5. Вдоль пути перпендикулярно направлению движения между рельсами 6 ус-таноааены полюсы развернутого ротора 7, выполненные в виде ферромагнитных брусков. Вдоль пути расположен профилированный швеллер S. На тележке укреплены магнитопровод датчика положения полюсов индуктора с управляющей катушкой 9 пе-
2 /
S | ||
Рис. 3.34. Линейная модификация двигателя
U 5 Wtl 12 Рис. 3.35. Линейный Д raquo;л*
с многократным потоков нием
еменного тока (малой управляющей мощности) и полупровод-иковый коммутатор 10.
Двигатель работает следующем образом. Рабочий поток, возникающий при подключении обмотки возбуждения / к источнику [витания, взаимодействует с токами, протекающими в проводах обмотки 5. При этом создается тяговое усилие, значение и знак 1,оторого определяются как током катушки возбуждения /, так н током, зависящим от напряжения на управляющей катушке 9 л характеристики коммутатора 10. Тяговое усилие зависит также
положения системы, питаемой переменным током, относительно системы, питаемой постоянным током (эффект laquo;сдвига щеток raquo;), рри этом возникает возможность регулирования или остановки дележки как путем сдвига системы проводов переменного тока 0 отношению к системе проводов постоянного чока на тележке, ак и смещением laquo;швеллера raquo; по отношению к системе полюсов постоянного тока на пути.
Применение неподвижного швеллера 8 с выступами позволяет также, используя какую-нибудь вспомогательную измерительную катушку на тележке, получить при помощи счетчика импульсов точную информацию о пройденном пути, а при помощи частотомера - информацию о текущей скорости движения тележки.
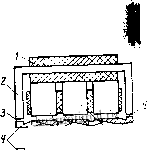
Разумеется, и для этой модификации вполне возможно применить систему с многократным потокосцеплением, упомянутую выше. При этом машина и путевая структура приобретает вид, показанный на рис. 3.35. Магнитный поток, создаваемый обмоткой возбуждения /, из ярма 2 через дополнительный зазор 3 попадает в приемную полосу 4 и поступает в полосу 5, затем через рабочий зазор 6 - в зубцы и спинку, пересекая якорную обмотку 7, аналогично рассмотренной выше магнитной системе шнейной машины [103[, представляющей собой развернутый бесконтактный сельсин с однократным потокосцеплением.
Одной из перспективных конструкций линейного двигателя. Не имеюгцей явных аналогов среди вращающихся машин, яв.-1яется иигатель с двухфункциональной обмоткой на статоре и безобмоточными полюсами, выполненными из ферромагнит1101о материала. Такой двигатель частично напоминает по конструкции нхронные реактивные машины, однако наличие двухфункци-ональной обмотки и обеспечение коммутации секций обмоток в зависимости от их положения относительно ферромагнитных полос воляют получить машину с возбужденными полюсами и иметь !Ртеристики, близкие к характеристикам машин постоянного
Применение подобных двигателей наиболее перспективно в Нейном электроприводе для промышленного карьерного, кон-ерного и дугового транспорта, где требуется реализация боль-
тяговых усилий при значительных воздушных зазорах. Двигатели такого типа могут работать от существующих си-
стем энергоснабжения как на постоянном, так и на переменноц, токе, однофазном или трехфазном. Различие при этом лищь j схеме построения преобразователя, предназначенного для пи. тания и управления линейным двигателем при той или иноц системе энергоснабжения. На постоянном токе преобразователь, обычно выполняемый на тиристорах, должен всегда иметь при! нудительную коммутацию независимо от способа управления. Это усложняет преобразователь, так как в этом случае необходимы дополнительные коммутирующие тиристоры и элементы для гашения основных тиристоров.
Более простой схемой преобразователя является схема на так называемых управляемых реверсивных выпрямителях. Сие-тема энергоснабжения переменного тока позволяет осуществить естественную коммутацию тиристоров и существенно упростить схему преобразователя.
Рассмотрим принципиальную конструкцию и особенности построения двигателей с двухфункциональной обмоткой. Наиболее перспективным и простым представляется линейный двигатель с двухфункциональной обмоткой на однопакетном статоре и с ротором в виде поперечных ферромагнитных брусьев, имеющих перемычки для замыкания магнитного потока. Исключительно простое выполнение обмотки первичной части и в виде рифленой стенки вторичной части позволяет создать надежную машину. Так, если стенки думпкара карьерного транспорта выполнить рифлеными, а вдоль пути движения в вертикальных стенках траншеи уложить обмотки статора, то получим обращенный вариант машины, где стенки думпкара использованы и как элемент конструкции коробки для перевозки груза, и как вторичный элемент линейного двигателя. В этой системе возможно выполнить и вариант двигателя, позволяющего при необходимости создать составляющую силы тяги, перпендикулярную * направлению движения, например, для уменьшения давления колес думпкаров на рельсы. Конструктивно возможны прямой и обращенный варианты двигателя.
В первом (прямом) варианте (рис. 3.36) подвижная часть содержит однопакетную первичную часть 2 с развернутой двуслойной обмоткой 3, а вторичная часть /, выполненная в видг поперечных ферромагнитных брусьев, соединенных между собой
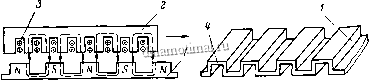
Рис. 3.36. Линейный двигатель с двухфункциональной обмоткой
продольными перемычками 4, расположена неподвижно вдоль направления движения.
Во втором (обращенном) варианте неподвижной частью яв- яется первичная часть с обмоткой, а вторичная часть выполнена подвижной, например, это может быть, как уже указывалось, есуЩ* часть конструкции экипажа.
Отметим также своеобразное выполнение обмотки 3. Она может быть выполнена как с неполным, так и с полным использованием меди. В первом решении упрощается схема коммутатора, а во втором лучше использованы активные материалы собственно двигателя [71].
Как показано на рис. 3.37, обмотка 3 разделена на секции 4-11, сдвинутые на половину полюсного деления. Все начала секций обмотки 3 подключены к тиристорному коммутатору, а все концы секций присоединены к общей шине. В общем случае источники тока возбуждения и тока якоря по напряжению разные, но их минусы объединены в общую шину. Секции обмотки поочередно подключаются к цепи возбуждения и цепи питания якоря синхронизированно с положением обмотки относительно магнитопровода /. Синхронизация переключения секций осуществляется датчиками положения и схемой управления.
Схема управления двигателем осуществляет переключение секций таким образом, чтобы полярность полюсов магнитопровода всегда оставалась одной и той же. Пусть, например, в первый момент в laquo;нижней raquo; части 4-й секции (рис. 3.36) перпендикулярно плоскости чертежа ток якоря проходит от нас. Затем ток, проходя по лобовым частям, приходит к нам в верхней части 6-й секции и замыкается на общую шину обмоток. Ток возбуждения отходит от нас в нижней части 5-й секции, проходит
2Д А У
Рис. 3.37. Двухфункциональная обмотка с упрощенной коммутацией
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 [ 19 ] 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |




