 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [ 30 ] 31 32 33 34 35
3. Выполнить компактный редуктор с высоким передаточным числом в одном модуле [колесо 12 - элемент 6 - колесо 24 (рис. 4.14, ж)] при вполне приемлемом КПД, особенно при выполнении его в электромеханическом варианте. Действительно, если выполнить угол наклона нарезок 21 и 31, р = 42 deg;, то при ynt трения t? = 6% КПД этой пары будет
tg (Р + t raquo;
0,81 .
КПД электромагнитного сцепления, особенно при использовании постоянных магнитов 34 и невысоких скоростях, будет близко к 1, и можно достигнуть полного КПД редуктора ц = 0,8. Если выполнить выступы на колесо 24 в виде устанавливаемых рядом шарикоподшипников, оси которых направлены по радиусу колеса, то можно иметь угол трения о 1,0 deg;; тогда даже при механическом сцеплении на всех сцепляющихся поверхностях имеем, например, для r-i = Ъг\, Pi = 80 deg; и (За = 10 deg;
laquo;1
100 при
tgSO-
tg (80 deg; + 1 deg;)
0,807.
4. Создать неограниченное линейное движение, например, экипажа, снабженного совершающими циклическое возвратно-поступательное движение элементами 6 vi 6 (по рис. 4.14) с нарезками 5 и /О на каждом комплекте элементов, связанных непосредственно с поршнями двигателя внутреннего сгорания на экипаже относительно произвольной длины пути, снабженного участками 16 ш 18 ш 16 и 18 с нарезками 17 ш 19 ш 17 и 19 с заданным зазором между элементами 6, 6 и участками 16, 18 и 16, 18; эти элементы заменят собой всю передачу от двигателя внутреннего сгорания к электрогенератору и весь линейный или обычный тяговой электропривод.
5. Решать задачи с помощью механизмов типа электродвигатель - муфта предельного момента - зубчатое колесо - рейка (например, привод стрелочных переводов на железнодорожном транспорте) [84].
Покажем, что именно вариант с электромагнитным сцеплением позволяет создать и многоскоростную систему с заданным количеством прямых и обратных скоростей с весьма высоким быстродействием. Такая система изображена на рис. 4.15, а-в. Несколько независимых возвратно-поступательных элементов (/, 2 на рис. 4.15, а) связаны, например, с поршнями различных цилиндров, со сдвинутыми по фазе движениями для достижения наибольшей равномерности. Элементы / и 2 скользят по направляющим 3, 4 и 5 и несут нарезки 6, 7 и соответственно 8, 9 lt; одним направлением, но с разным наклоном нарезок, во впадинах которых размещены катушки 10, подсоединенные к источнику 174
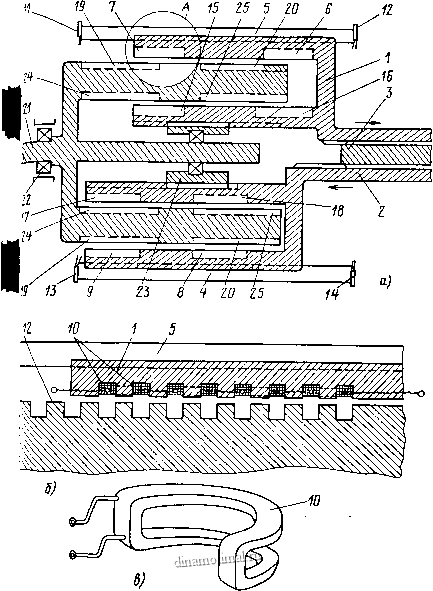
4.15. Электромеханический преобразователь движений поршней цилиндров ателя внутреннего сгорания в однонаправленное вращение с заданными частотами вращения:
схема преобразователя; б - детализация нарезанной части; в - аксонометрия катушки, размещаемой в пазах нарезанной части
постоянного тока через концевой выключатель (77 либо 12 элемента 7; 13 или 7 - для элемента 2) и переключатель ( рисунке не показанный). Нарезки 75 и 1б во внутренней цу элемента 7 и нарезки 77 и 7S на элементе 2 имеют встречные относительно наружных нарезок направления и разные наклоны; расположенные в их впадинах катушки подключены через конце вой выключатель и переключатель к источнику тока в зависимости от направления движения элементов 7 и 2 и положения переключателя. Нарезки 6, 7 элемента 1 и 9, 10 элемента 2 взаимодействуют с аналогичными нарезками 19 и 20, расположенными на внешней окружности элемента 27, вращающегося в опорно-ради-альных подшипниках 22 и подшипниках, расположенных во внутренних направляющих 23, а нарезки 75, 76 и 77, 18 - с нарезками 24 и 25 внутренней поверхности элемента 27.
Пусть в момент, показанный на рис. 4.15, а, в данном положении переключателя катушки нарезки 7 элемента через замкнутый концевой выключатель 77 подключены к источникам тока. Остальные катушки (элемента /) выключены. Соответственно включены также катушки нарезки 77 элемента 2 (остальные катушки этого элемента выключены). Совместным взаимодействием потокосцеплений нарезок 7-/9 и 17-24 элемент 27 приводится во вращение, например, по часовой стрелке. При достижении элементом / крайней точки своего движения (вправо - на рис. 4.15, а) концевой выключатель 12 отключает катушки нарезки 7 и подключает катушки нарезки 75, имеющей, как уже указывалось, обратное направление нарезки. Таким образом, при обратном ходе элемента / элемент 27 будет приводиться во вращение в том же направлении. Аналогично и независимо действует и элемент 2 - независимо от фазы его движения относительно элемента 1. и его возвратно-поступательное движение будет вызывать однонаправленное вращательное движение элемента 21. Для изменения частоты вращения элемента 21 при той же частоте колебании элементов / и 2 достаточно переключателем подключить к концевым выключателям катушки нарезок 6 и 8 (соответственно 16 и 18). Для реверса достаточно переключать катушки к противоположным относительно указанных концевым выключателям. Таким образом может быть реализована электромагнитная короо-ка скоростей с кнопочным электропереключателем и высоким быстродействием. Электромагнитная постоянная времени переключения катушек может быть доведена до малых величин, например, введением форсирующих добавочных сопротивлении, а электромеханическая постоянная времени резко снижена, и в процессе реверсирования или изменения скорости участву лишь момент инерции элемента 21. Аналогично обстоит дело при создании поступательного движения - вращающийся npt-водной элемент не реверсируется.
Это прищипиальное решение особо интересно для привода у
ройства, где требуется по заданной программе или в функции хода технологического процесса частое реверсирование и время реверса существенно сказывается на производительности устройства. Привод выполняется с однонаправленно вращающимся быстроходным двигателем, связанным с элементом 27 (рис. 4.15, а), а элемент / имеет винтовую нарезку на рабочем конце. Подключением переключателя к программной цепи можно, таким образом, обеспечить безредукторный привод устройств с быстрыми реверсами по заданной программе при нереверсируемом приводном двигателе.
Основным критерием для сравнительной оценки электромагнитного и механического сцеплений является реализуемое удельное усилие на площади взаимодействия и доля полезно используемой площади взаимодействия в общих габаритных размерах устройства. Для электромагнитного сцепления предельное значение удельного усилия для практически реализуемых индукций будет около 10-10 Н/м\
Значение этой величины для механического сцепления намного больше. Действительно, если принять при грубой оценке в качестве предела прочности F = 400 Н/мм = 4-10* Н/м и считать, что не оставляющая никаких остаточных деформаций при практически неограниченной продолжительности работы, связанной с соударениями, величина будет примерно в 20 раз меньше, то имеем Ржх ~ 2-10 И/м\ примерно в 200 раз большую, чем при электромагнитном сцеплении. Площадь фактического механического взаимодействия, например, у зубчатой шестеренной пары составляет величину порядка l/(zi -f-Z2) площади ободов шестерен, и при числе зубьев z, = 16 и Z2 = 64 рабочая площадь сцепления меньше полной площади наружной поверхности вращающихся частей примерно в 80 раз. При использовании примерно 0,8 площади зазора у электромагнитного сцепления эффективность использования указанной поверхности ниже у электромагнитного Сцепления примерно лишь втрое.
4.3. СРАВНИТЕЛЬНОЕ РАССМОТРЕНИЕ АЛЬТЕРНАТИВНЫХ РЕШЕНИИ НЕКОТОРЫХ типовых ЗАДАЧ СОЗДАНИЯ НИЗКОСКОРОСТНОГО ЭЛЕКТРОПРИВОДА
В качестве таких типовых задач рассмотрим:
1) привод небольших поступательных перемещений относительно малой мощности;
2) привод значительных возвратно-поступательных перемещений средней .мощности;
3) привод барабанного вакуум-фильтра средней мощности, но е малой частотой вращения выходного вала (до 1 об/мин);
4) привод эскалатора метро значительной мощности (100- 25 кВт), но с низкой (9,5 об/мин).
частотой вращения выходного вала
Конечно, речь идет не о техническом проектировании всех этих типов приводов в нескольких вариантах, а о сравнительной приближенной оценке, позволяющей определить рациональность применения того или иного варианта решения для данного класса приводов. Для МДД в соответствии с соображениями, приведенными в предыдущем параграфе, проводятся рассмотрение и выбор основных размеров, дается оценка массо-габаритных показателей; расчет базовых модулей по действующей методике дается сколько-нибудь подробно только для примера рольгангового привода.
Для сравнительной оценки различных приводов поступательного движения рассмотрим задачу, решаемую в настоящее время преимущественно электрогидравлическими толкателями [19]. Это устройство достаточно массового использования. По данным, приведенным в [19], масштаб их применения только для комплектации подъемно-транспортных механизмов примерно 300- 400 тыс. шт. в год. Проведем сравнение образцов, по своим параметрам близких к МДД П (поступательного движения), описанной в sect; 4.1.
Для сравнения рассмотрены широко применяемые трехфазные электромагниты КМТ-7А с тем же ходом / = 80 мм, но примерно вдвое большим тяговым усилием (F ж 1400 Н при ПВ = 40%, что соответствует F ж 800 -f- 900 Н при ПВ == 100% У КМТ-7А против F ж 500 Н при ПВ = 100% У МДДП), гидротолкатель ТГМ-80 с ходом / = 50 мм и усилием при ПВ = 100% F я raquo; 800 Н, электротолкателем Т45Б с ходом / = 50 мм при усилии F laquo; ж 450 Н и Т75Б с ходом / = 80 мм при усилии F ж 750 Н, электротолкатель фирмы AEG (ФРГ) Ed-2 с ходом 1=15 мм и усилием F laquo; 450 Н (все параметры довольно близки к параметрам рассматриваемого МДДП), а также выпускаемый в НРБ [99] плоский короткоходовой линейный асинхронный двигатель ЛИД-ММ 14/3,8 с ходом около 0,36 м, пусковым усилием при ПВ = 15%, Рп = 240 Н, синхронной скоростью = 3,8 м/с (при ПВ = 100% и примерно линейной механической характеристикой имеем Vpa6 = 1,9 м/с; F ж 50 Н) и цилиндрический линейный двигатель [31], имеющий при Vp.e ж 0,3 м/с и ПВ = 100% усилие F ж 60 Н. В этом последнем двигателе обеспечивается наибольшее использование площади взаимодействия первичной и вторичной частей машины. Так как между сравниваемыми устройствами нет полной идентичности выходных параметров, то для получения сравниваемой информации приняты показатели: удельная масса всего привода, кг/кВт, /Ппр= т/Р, где т - масса всего устройства, а - его средняя мощность, рассчитываемая как отношение полной работы (в кН-м) Ж = F/ к времени рабочего хода в секундах, а также удельная масса, кг/(кН-м), т = m/W - величина, аналогичная отношению массы машины к моменту на ее оси у вращающихся машин. У МДДП масса статора, как у-*
указывалось, /п, ?к 12 кг, масса ротора при ходе в 0,08 м \ 7:i Ъ КГ И масса остальных конструкционных элементов ?к ; 1,5 кг, т. е. /п бщ ж 16,5 кг. При v = 0,3 м/с время рабочего ; хода / = 0,08 м определяется как t = (l/v) + At, где At - время переходного процесса. At х 3-10 с при разгоне под нагрузкой, а без нагрузки время достижения скорости v = 0,3 м/с. At л; 5Х , yilO с. Отсюда t= 0,3 с; выполняемая работа W= 0,5-0,08 = = 0,04 кН-м; Р2= 0,133 кВт; т р 125 кг/кВт; т К 415 кг/(кН-м).
У трехфазного электромагнита КМТ-7А при ПВ = 40% W = = 0,112 кН-м; при ПВ = 100% Ж ж 0,068 кН-м; m = 213 кг; /ПпрЗИО кг/(кН-м); масса меди /п == 29 кг и = = 425 кН-м (при ПВ = 40% = 258 кг/(кН-м)).
У гидротолкателей ТГМ-80 W = 0,04 кН-м; масса m =29 кг и fn p X 125 кг/(кН-м); у электрогидротолкателей Т45Б W = = 0,0225 кН-м; масса m = 37 кг и т = 1640 кг/(кН-м); время рабочего хода t = 0,7 с; Рг = 0,032 кВт; тр = 1150 кг/кВт. На толкателе Т45Б установлен электродвигатель мощностью 0,12 кВт; если во время рабочего хода его мощность используется полностью, то эквивалентный КПД гидравлической части устройства Г1з,з 0,27. У электродвигателя Т75Б эти показатели немного лучше: Ж = 0,06 кН-м при массе m = 51 кг, т.е. /пр = = 850 кг/(кН-м); время рабочего хода t = 0,8 с; Рг = 0,075 кВт и т р = 680 кг/кВт. Мощность установленного на Т75Б двигателя 0,18 кВт, а 11э, lt;в ж 0,4, т. е., как обычно, у больших устройств показатели лучше.
Не слишком отличаются от этих данных показатели электро-гидротолкателя AEG Ed-2: W х 0,034 кН -м; m = 23 кг; ? = = 0,76 с; Рг = 0,045 кВт; т.р = 525 кг/кВт; 660 кг/
(кН-м); установлен электродвигатель мощностью в 0,2 кВт. При полном использовании этой мощности во время рабочего хода имеем для гидравлической части установки г! , 0,225. При обычном КПД Г] X 0,6 для двигателей мощностью порядка долей киловатт имеем для всего устройства т] ж 0,135 - довольно близкое значение к КПД линейных двигателей при малых скоростях движения (здесь v,.p = l/t= 0,1 м/с).
В качестве линейного привода для этой задачи ограничимся рассмотрением уже неоднократно упоминавшегося выше цилиндрического линейного асинхронного двигателя НЭТИ, обеспечивающего скорость перемещегшя v ж 0,27 м/с; применять здесь ЛДПТ с коллектором или любым преобразователем, по-видимому, нецелесообразно.
Для двигателя НЭТИ: производимая работа Ж=0,02]6 кН-м; чри массе m = 9,8 кг имеем тр = 454 кг/(кН-м); рабочая скорость V = 0,3 м/с; Рг = 0,018 кВт и т, = 544 кг/кВт.
Для плоского короткоходового линейного асинхронного элек-Родвигателя Ж = 0,018 кН-м; при массе всей машины m =
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [ 30 ] 31 32 33 34 35 |




