 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электрические машины, экономичность
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 [ 31 ] 32 33 34 35 ![]()
- 20 кг (масса статора == 14 кг) имеем т = 1100 кг/ (кН-м). Более высокая скорость рабочего хода v = 1,9 м/с при Рг
- 0,095 кВт обеспечивает этой машине несколько лучший показатель ш=210 кг/кВт.
Результаты проведенного анализа сведены в табл. 4.1, наглядно иллюстрируюшую существенные преимущества применения для этого класса задач именно машины двойного движения поступательного типа, особенно если учесть высокую надежность такой машины и простоту ее обслуживания.
У электрогидротолкателей на малые усилия электродвигатель, приводящий в движение центробежный насос, погружен в рабочую жидкость, а на усилия более 50 кг он отделен от рабочей жидкости уплотнением на валу и весь аппарат обдувается венти-
Таблица 4.1. Результаты сравнения короткоходовых приводов поступательного
движения
F при | -, с | ||||||||
№ п/п | Тип привода | ПВ= 100%, | 1, м | W, кН-м | т, кг | 5 X 5 | F2, кВт | т, кг/кВт | |
Трехфазный электромагнит КМТ7А | 0,08 | 0,068 | 3140 | ||||||
Гидротолкатель | 0,05 | 0,04 | |||||||
ТГМ-80 | |||||||||
Электротол- | 0,05 | 0,0225 | 1640 | 0,032 | 1125 | ||||
0,071 | |||||||||
катель | |||||||||
Т45Б-100 | 0,8 0,2 | ||||||||
Электрогид- | 0,08 | 0,06 | 0,075 | ||||||
ротолка- | |||||||||
тель Т75Б | 0,76 | 0,045 | |||||||
Электрогид- | 0,075 | 0,034 | |||||||
ротолка- | |||||||||
тель фир- | |||||||||
мы А EG | |||||||||
Ed-2 Плоский ли- | 0,36 | 0,018 | 1100 | 0,19 1,9 | 0,095 | 210 | |||
нейный | |||||||||
асинхрон- | |||||||||
ный дви- | |||||||||
гатель ти- | |||||||||
па лид- | |||||||||
ММ 14/3,8 Цилиндри- | 0,36 | 0,0216 | 1,2 0,3 | 0,018 | |||||
ческий | |||||||||
линейный | |||||||||
асинхрон- | |||||||||
ный дви- | |||||||||
гатель | |||||||||
НЭТИ мддп . | 0,08 | 0,04 | 16,5 | 415- | 0,3 -0,3 | 0,133 |
лятором, насаженным на свободный конец вала электродвигателя.
Для потребителей, где требуется ускоренное опускание штока, фирма AEG комплектно с толкателем поставляет конденсаторы, которые подключаются параллельно статорной обмотке электродвигателя толкателя, создавая тем самым после снятия питающего напряжения динамическое торможение вращающихся частей и обеспечивая этим быстрое опускание штока.
Сравнительное рассмотрение различных типов безредукторного электропривода для значительных возвратно-поступательных движений средней мощности проведем на примере привода станка-качалки 4СК-3-1,2 с максимальным значением усилия в 3 т (З-Ю Н) при ходе 1,2 м и числе качаний 5-15 в минуту. Расчет ведем для 10 качаний в минуту, т. е. для средней ско-2-1,2-10 пл /
рости v = ---=0,4 м/с; э качестве расчетной величины
принимаем v = 0,5 м/с. При максимальном усилии F= 3-10 Н имеем максимальную мощность Р ,. = 15 кВт. Следует отметить, 1 что у штатного станка-качалки, установленная мощность дви-
1\ 13
=т I
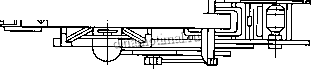
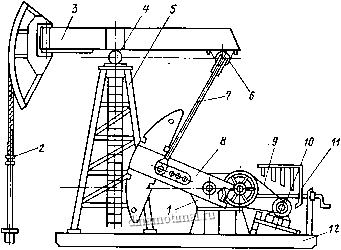
Рис. 4.16. Общий вид станка-качалки
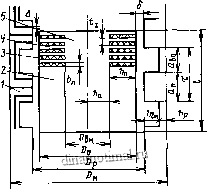
Рис. 4.17. Безредукторный привод системы штанг станка-качалки на базе ЛДПТ с двухфункциональной обмоткой
гателя меньше (7,0 кВт) и приводимые ниже расчеты безредукторного электропривода даю значительный запас мощности.
Станок-качалка имеет индивиду, альный механический привод штангового скважинного насоса при эксплуатации скважин. Станок-качалка (рс 4.16) состоит из рамы 12 с подставкой под редуктор и поворотные салазки стойки 5 балансира 3 с головкой и противовесами (при балансирном или комбинированном уравновешивании), опоры балансира, траверсы 14, опоры 6 траверсы, двух шунтов 7, двух кривошипов 8 с противовесами (при комбинированном или кривошипном уравновешивании), редуктора /, тормоза 13, клиноременной передачи 9 (включая к.линовые ремни, ведущий и ведомый шкивы), электродвигателя 10, подвески устьевого штока 2 с канатом, ограждения кривошипно-шатунного механизма ,
Сложная и громоздкая конструкция с большим числом сочленений, подшипников, требующих смазки и ухода, может быть заменена при обеспечении необходимых экономических показателей безредукторным электроприводом, установленным непосредственно на устье скважины. На рис. 4.17 показан безредукторный электропривод по типу ЦЛДПТ с двухфункциональной обмоткой, наружный ротор с разрезными полюсами / которого непосредственно соединяется с системой штанг или с помощью промежуточного троса. Неподвижный статор 2 ЦЛДПТ набран из стальных листов - laquo;зубцов raquo; 4, замкнутых продольными пакетами 5, и снабжен цилиндрическими плоскими катушками 3 и кольцевыми пакетами. Упомянутый в гл, 1 режим работы с неизменным ускорением (см. рис. 1,10) приобретает у станка-качалки дополнительный смысл - ограничение сверху значения модуля ускорения необходимо здесь по технологическим соображениям. В этом случае обеспечение заданного времени перемещения при минимальном модуле ускорения означает постоянство модуля ускорения с переменной его знака в заданных точках.
Основное уравнение движения ротора с системой штанг имеет вид
+ + Fix) = mg,
(4.20)
где m = 2m; - суммарная масса труб, нефти, подвижного ротора и т. п; Kg - коэффициент, учитывающий вязкость нефти; F(,x) - искомая функция усилия воздействия статора и ротора.
Учитывая, что модуль ускорения \dx/dt\ должен быть меньше заданного, можно использовать график скоростей в виде треугольников, тогда \dx/dt \ - = const, что соответствует оптимальному режиму.
При /=0х=0, gt;0.
; при t=ti =-*i- 0; Ри
4t to же, что при t = О и т. д. dx
. lt; 0; при t=Ъt X = - д: = 0; при t at at
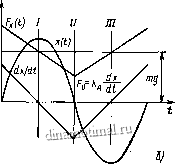
Соответствующие графики зависимостей x(t), (t) и требуемого усилия на
роторе F(t), обеспечиваю1цие указанные зависимости, показаны на рйс. 4.18.
Для создания такого режима усилий можно было бы применить как машину двойного движения с поступательным движением (МДДП), так и любой линейный двигатель, например цилиндрический линейный асинхронный двигатель (ЦЛАД) или цилиндрический линейный двигатель постоянного тока (ЦЛДПТ), расчет которого дан в sect; 3.3. Но МДДП требует, как уже показано в предыдущем параграфе, значительной площади зазора в связи с ограничениями по сцеплению и (даже при простейшем роторе без обмоток типа ротора Шенфера) подведения тока гибким кабелем к возвратно-поступательно перемещаемому статору, что существенно снижает надежность привода. Этим же недостатком обладает привод ЦЛДПТ. ЦЛАД обладает при требуемых скоростях примерно 0,4-0,5 м/с весьма низкими энергетическими показателями: f)cosip lt;0,l. Поэтому в качестве основы безредукторного привода для станка-качалки принят цилиндрический ЛДПТ с двухфункциональной обмоткой, не требующий подвода тока к подвижной части. Существенное повышение КПД такого двигателя при низких скоростях движения удалось достичь, как видно из приводимого ниже расчета, путем использования низких значений плотности тока в обмотках машины.
Заданный по кривой рис. 4.18, а график изменения усилия в функции положения и направления движения можно получить при помощи датчиков взаимного
F/Fm 1,0
0,5 1,0
0,15 0,5 0,75
концевой концедой
переключатель переключатель
/о-овратмое | ||
1 /у поле | ||
А 8) |
Рис. 4.18. Графики: а - зависимости скорости пути и усилия для безредукторного привода станка-качалки (2Н - полный ход; h/h - относительное перемещение; F/F - относительное значение усилия); б - цикла перемещения при асинхронном базовом двигателе; в - цикла перемещения на механической характеристике
положения секции статоров и полюсов ротора, сигналы которых управляют ристорными ключами с естественной коммутацией (невысокая частота переключения секций соответственно низкой скорости движения позволяет обеспечить такую коммутацию и при частоте питания в 50 Гц), и логической схемы с концевыми выключателями, определяющих направления движения. Ввиду малого значения реактивной ЭДС (при одновитковых секциях е,х 1,26 В) можно применить неподвижный линейный коллектор (если этого требуют условия техники безопасности - в герметичном корпусе и в масле или другой среде), к ламелям которого подведены две системы отпаек от трансформатора (с выпрямительными устройствами); причем выбор системы отпаек ( laquo;вверх raquo; или laquo;вниз raquo;) производится системой конечных выключателей, а система щеток электрически связана с секциями машины и механически - с движущимся ротором. Расчет проведен для трех вариантов: двух - с одинаковыми размерами и разными коэффициентами заполнения медью сечении плоских цилиндрических катушек статора машины (0,4 и 0,6). Значение этого коэффициента 0,6 представляется вполне достижимым для тонких катушек, и в качестве основного для проектирования безредукторного привода станка-качалки может быть рекомендован вариант, при котором общая масса, на 1000 кг меньше, чем у штатного станка-качалки (2400 кг против 3400 кг), масса статора лишь в 1,5 раза больше, чем масса одного редуктора у штатного станка-качалки (700 кг), а КПД достигает вполне приемлемого значения 11 = 0,6.при столь низких плотностях тока в катушках (около 2-10 А/м ), что машина при естественном охлаждении будет иметь низкую температуру перегрева й, следовательно, весьма большую долговечность.
При оценке сравнительных показателей безредукторного привода и обычного редукторного привода станка-качалки следует также учесть, что приведенный ниже расчет исходит из полезной мощности в 15 кВт на тяге системы штанг, тогда как штатный двигатель станка-качалки имеет на валу мощность в 7 кВт, т. е. расчет дает запас в 2-2,5 раза. Следовало бы также сопоставить удельную массу штатного станка-качалки /Прд = 486 кг/кВт с удельной массой рекомендуемого безредукторного привода твр = 160 кг/кВт, что дополнительно подтверждает явное преимущество безредукторного решения. Некоторое увеличение КПД (с 0,6 до 0,615) у варианта ЦЛДПТ с = 0,65 м не окупает резкого повышения массы.
Вариант с обмоткой на роторе достигается слишком дорогой ценой - резким повышением массы ротора.
Расчет обращенного цилиндрического линейного автосинхронного двигателя Исходные данные:
максимальное тяговое усилие ттах~ З-Ю** И; скорость V = 0,5 м/с; воздушный зазор б = 0,005 м; коэффициент полюсной дуги о,- = 0,5;
число пазов на полюсное деление = 6;
полюсное деление т = 0,2 м; ширина разреза полюса а = 0,005;
суммарная ширина разрезов вторичной части 2Д = 0,015 м;
длина статора / = 0,8 м; число полюсов 2р = 4.
1. Принимаем = 0,65 Тл и Л = 90- А/м.
2. Зубцовое деление = ijq = 0,2/6 = 0,0333 м.
3. Ширина, зубца при В, = 1,5 Тл и К = 0,95
6 0,65-0,0333
= -в:к:Г 1,5-0,95 =0.012м.
4. Ширина паза
b = t-~b = 0,0333 - 0,0152 = 0,0181 м.
5. Диаметр статора = 0,5 м.
6. Внутренний диаметр спинки статора при В = 1,4 Тл
2B,a D /2.0,65-0,1-0,5
= V -в:кг = V 1,4.0,9 = м.
7. Наружный диаметр машины при В = 1,3 Тл из равенства
где a = a,t = 0,5-0,2 = 0,1 м;
Л, = 0,25т = 0,25-0,2 = 0,05 м. 8. Высота спинки статора
0, 0,227 . К = -= 2-= 0.1135 м.
9. Высота спинки вторичной части 2
. Я - - 2Л. 0,65 - 0,51 - 2-0,05 Яр =-- =--= 0,02 м.
10. Высота паза
. - - .л 04 - 0,227
laquo;п =-2---= 0,1365 м.
П. Коэффициенты воздушного зазора
К + т 0,0333 +0,05
~ + 106 ~ 0,0152 + 0,05 - 2= .
t.p + 106 0,0275 + 0,05 \
+ 106 0,0225 + 0,05 ~ . = KjiKsj = 1,278-1,069 = 1,366.
12. МДС воздушного зазора
fs= ибВКб-Ю = 1,6-0,65-1,366-0,005.10 = 7104 А.
13. МДС зубцов
= Н,2Л = 25-2-13,65 = 682,5 А.
14. МДС спинки статора
= Я,(т + = 15,8 (20 + 11,35) = 495,3 А.
15. МДС crfnHKH вторичной части
f р = Яр (т + 2Л. + Лр) = 14,2 (20 + 10 + 2) = 454,4 А.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 [ 31 ] 32 33 34 35 |




