 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 [ 108 ] 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
намотки каждого слоя могут быть сняты послойным регулирова-лием. Все это теоретически могло бы увеличить производитель-, ность на 10-15%. Однако осуществление базисного и послойного регулирования связано с применением более сложных приводных устройств и увеличением из-за этого стоимости машины.
Технико-экономический анализ эффективности применения регулируемого привода прядильных машин, проделанный на базе данных длительной эксплуатации таких приводов на тек- стильных предприятиях, определил технико-экономическую эффективность применения приводов с базисным и послойным регулированием скорости прядения на прядильных машинах для шерсти и только с одним базисным регулированием на прядильных машинах для хлопка.
Электропривод прядильных машин для шерсти с коллекторным электродвигателем трехфазного тока. Электропривод прядильных машин с коллекторным двигателем был первым автоматизированным, приводом, удовлетворяющим в основном требо-. ваниям автоматического регулирования - прядения (базисного и послойного).
Регулирование скорости вращения двигателя осуществляется специальным механизмом-регулятором прядения, перемещающим траверзы со щетками симметрично относительно нейтральной оси.
Программное регулирование скорости прядения (базисное и послойное) в приводе прядильной машины от коллекторного трехфазного двигателя осуществляется при помощи специального механического устройства - регулятора прядения.
Регулятор прядения представляет собой механизм, преобра-. зовывающий движение кольцевой планки в перемещение тра- верз со щетками коллектора. В существующих конструкциях регуляторов прядения это преобразование осуществляется при помощи механизмов, суммирующих перемещение кольцевой планки, получаемое от храпикового и эксцентрикового валов прядильной машины.
Для обеспечения требуемого изменения скорости прядения, приближающегося к идеализированному, необходимо, чтобы скорость машины менялась по заданному закону. Закон изменения . скорости прядения должен обеспечить процесс прядения с постоянным натяжением нитей.
Для преобразования движения указанных выше механизмов машины в перемещение щеток коллекторного двигателя регулятор прядения имеет два эксцентрика: один для послойного регулирования, получающий движение от вала прядильного эксцент-V рика, и другой для базового регулирования, вращаемый от храповика прядильной машины через гибкий вал. Вращательное движение базового и послойного эксцентриков при помощи рычагов и роликов, скользящих по эксцентрикам, преобразуется
в возвратно-поступательное движение рычагов в вертикальной плоскости.
Амплитуда возвратно-поступательного движения рычагов может регулироваться при наладке регулятора изменением плеча рычагов базисного и послойного регулирования.
Возвратно-поступательное движение рычагов базисного и послойного регулирования суммируется при помощи цепи, связанной с механизмом щеток коллекторного двигателя.
Кинематическая схема регулятора прядения показана на рис. 9.1.
Несмотря на положительные качества коллекторных двигателей, а именно: возможность плавного регулирования скорости с малыми потерями в значительных пределах; жесткость механической характеристики, удовлетворяющей требованиям привода текстильных машин; высокие энергетические показатели \ (со8ф=0,82н-0,84; к. п. д.-0,8 для номинальной нагрузки), привод машин с этими двигателями имеет ряд недостатков. К основным из них следует отнести:
1.Сложность узла коммутации. Вследствие наличия трансформаторной э. д. с. коллектор обычно выполняется из большого числа пластин, поэтому щетки приходится выполнять тонкими и длинными. Кроме того, траверзы со щетками делаются подвижными для перемещения последних по коллектору при регулировании скорости. Все это усложняет и удорожает узел коммутации.
2- Трудность решения задачи охлаждения, вследстБ.ие того, что основное тепло выделяется в роторе и теплоотвод через внешнюю поверхность двигателя становится малоэффективным. Поэтому коллекторные двигатели в приводах прядильных машин выполняются с принудительным охлаждением, с подводом охлаждающего воздуха и отводом нагретого по специальным воздухопроводам. Привод прядильных машин с коллекторными двигателями имеет относительно большие габариты, что не дает возможность встроить их в машину, а при установке рядом с машиной габариты помещения должны быть больше.
Электропривод прядильной машины для шерсти с двигателем постоянного тока. Принципиальная схема привода с двигателем
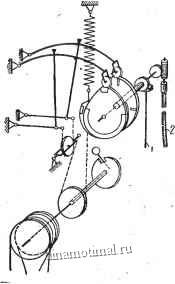
Рис. 9.1. Кинематическая схема регулятора прядения
постоянного тока показана на рис. 9.2. Система предусматривает регулирование двигателя постоянного тока, питаемого от сети трехфазного тока через дроссель с подмагничиванием и вентили (кремниевые диоды). Изменение скорости двигателя осуществляется изменением тока в обмотке управления дросселя насыщения 4 и, следовательно, изменением напряжения на выходе
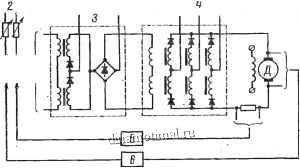
Рие. 9.2. Принципиальная схема электропривода прядильной машины для шерсти с двигателем постоянного тока
узла дроссель - выпрямитель. Изменение тока подмагничивания в обмотках управления дросселя для базисного и послойного регулирования осуществляется автоматически от датчиков (сигнал 2). Схемой предусматривается обратная связь 5 по току и 5 по напряжению двигателя. Схематически датчики базисного и послойного регулирования показаны на рис. 9.3. В качестве
Рис. 9.3. Схема датчиков базисного и послойного регу-. лирования скорости прядильной машины для шерсти в приводе от-двигателя постоянного тока
датчика базисного регулирования применен потенциометр R, а в качестве датчика-послойного регулирования - индукционный датчик ЯД. Оба .датчика приводятся .в движение посредством кулачков /-4, расположенных на управляющем штоке 5, который механически связан с кольцевой планкой. Рукоятка потенциометра R получает движение от кулачка / через рычаг Л при движении штока слева направо, что соответствует постепенному подъему кольцевой планки. В течение времени наработки съема
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 [ 108 ] 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




