 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 [ 13 ] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
ну, которой можно пренебречь. На рис. 2.12,6 изображены ги-стерезисная мощность Р, механическая мощность ротора
Яр = (1-5)Рг (2.31)
и мощность потерь на гистерезис, нагревающая ротор,
ДРг = sP,. (2.32)
Таким образом, в асинхронном режиме при пуске в ход действует постоянный вращающий гистерезисный момент Mr. Рабочий режим двигателя характеризуется его синхронным вращением (s=0). Этот режим наступает по окончании процесса пуска при условии, что гистерезисный момент превышает статический момент сопротивления.- Синхронный режим соответствует точке пересечения кривой статической мощности Рс с осью ординат (точка С на рис. 2.12,6). Гистерезисный двигатель имеет низкий коэффициент мощности. Его применяют в устройствах малой мощности, требующих постоян йой скорости вращения.
sect; 2. 7. Шаговые электродвигатели
Синхронный электродвигатель, преобразующий электрические импульсы Б дискретные механические перемещения, называется шаговым, или импульсным. Такие двигатели используются в различных автоматических устройствах с дискретным или шаговым, характером механического движения. Их можно разделить на устройства: а) в которых шаговые двигатели выполняют роль приводных двигателей различных исполнительных механизмов (подачи станков, золотников гидроусилителей, затворов и задвижек, лентопротяжных механизмов, кулачковых барабанов, переключателей электрических цепей и др.); б) в которых шаговые двигатели используются для преобразования сигнала унитарного вида (соответствующего заданной программе движения) в другую форму электрического сигнала. В этом случае шаговый двигатель поворачивает ротор сельсина, сердечник вращающегося или дифференциального трансформатора и т. д.
По числу обмоток управления или фаз шаговые двигатели подразделяются на: одно-, двух-, трех- и многофазные. Различают реактивные двигатели без обмотки возбуждения и двигатели с обмоткой возбуждения на роторе. Число зубцов на статоре и на роторе может быть одинаковым и различным. На практике наиболее широко используются трехфазные реактивные шаговые двигатели. Это объяЬняется тем, что данный тип двигателя обеспечивает реверсирование и устойчивость работы будучи сравнительно простым по конструкции и управлению. -
Схема маломощного трехфазного редукторного шагового двигателя с реактивным зубчатым ротором 2 и явнополюсным статором с зубцами приведена на рис. 2.13, о. Обмотки управления, расположенные на полюсах статора смещены между собой на одно полюсное деление. На каждом полюсе статора размещены катушки двух соседних обмоток управления. Между обмотками имеется сильная электромагнитная связь, вследствие которой сокращается время нарастания тока в них и повышается к. п. д. по сравнению с системой обмоток, магнитно не связанных между собой. Зубцы каждой диаметрально расположенной пары полюсов статора смещены на Уз зубдово-го деления в противоположных направлениях относительно зубцов двух соседних пар полюсов.
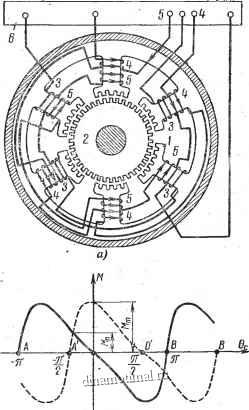
Рис. 2.13. Редукторный шаговый двигатель: V а) схема; б) статический синхронизирующий момент шагового двигателя
Поочередное возбуждение обмоток управления (от источника постоянного тока) вызывает шаговые повороты ротора на 7з зубцового деления в направлении, зависящем от последовательности подачи импульсов. Подаче импульсов в порядке 4-5-6-4 отвечает одно направление шагового вращения ротора, а импульсам очередности 4-6-5-4 соответствует противоположное направление дискретного вращения ротора. Остановка ротора двигателя в фиксированном положении достигается включением постоянного тока в одну из обмоток управления. Свойства шагового двигателя определяются рядом его показателей и характеристик. К ним относятся:
1. Величина шага двигателя или угол поворота ротора, отвечающий одному импульсу напряжения,
= = . (2.33)
Здесь 2р - число полюсов;
т- число фаз или обмоток управления. В реактивном двигателе число полюсов равно числу зубцов на роторе 2р=2. Шаг двигателя, как видно из (2.33), уменьшается с увеличением его числа полюсов (зубцов). В различных типах трехфазных импульсных двигателей величина шага изменяется в пределах 1,5-10 deg;.
2. Статический синхронизирующий момент или вращающий момент в установившемся электромеханическом режиме при постоянном токе в обмотке управления и нулевой скорости ротора. Этот момент выражается в виде функции двух переменных: угла рассогласования 6 между осью ротора и осью н. с. статора, а также тока управления.
Из известного соотношения, определяющего вращающий момент в виде производной магнитной энергии системы по углу поворота ее подвижной части, получается общая формула для синхронизирующего момента двигателя:
M=p{Iwf, (2.34)
где Iw - H. с. управляющей обмотки;
G-магнитная проводимость на пару полюсов; 6 - геометрический угол рассогласования между осями зубцов статора и ротора. Как показывает (2.34), синхронизирующий момент при определенных условиях пропорционален произведению числа полюсов, н. с. обмотки управления в квадрате и производной магнитной проводимости по углу поворота ротора.
В настоящее время изготавливаются силовые шаговые двигатели с максимальным статическим моментом, достигающим нескольких десятков джоулей.
| 1 2 3 4 5 6 7 8 9 10 11 12 [ 13 ] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




