 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
Вращающий момент, дж.
(2.43)
где и -f-=0,1045.
Из них вытекают уравнения скоростной й механической характеристик:
/г =
(2.45)
Скоростная и механическая характеристики двигателя - прямые линии в случае постоянства магнитного потока, напряжения и сопротивления цепи якоря. У двигателей с независимым и параллельным возбуждением ток возбуждения постоянный, и результирующий поток изменяется лищь вследствие размагничивающего действия реакции якоря. При приближен-
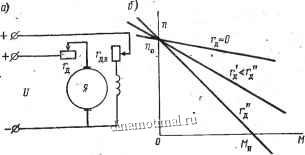
Рис. 2.16. Двигатель постоянного тока с независимым возбуждением:
а) схема; б) естесяшенная и иокуостввнные механические характеристики о введением добавочного сопротивления в цепь якоря
ЮМ расчете характеристик реакцию якоря не учитывают, ползая Ф=соп81, При этом допущении естественная и искусствен-гые характеристики двигателей с независимым возбуждением рис. 2.16, а) имеют линейный характер (рис. 2.16,6).
Из формулы (2.45) видно, что скорость при холостом ходе
М = 0) будет laquo;о = , а вращающий момент при коротком
$амь1кании (неподвижном якоре)
Жесткость механических характеристик уменьшается при увеличении сопротивления в цепи якоря (см. рис. 2.16,6), а также сопротивления в цепи возбуждения (рис. 2.17, с) и остается постоянной при изменении напряжения (рис. 2.17,6).
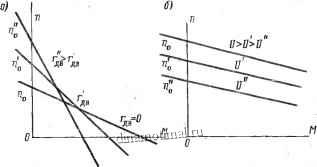
Рис. 2.17. Механические характеристики двигателя постоянного тока с независимым возбуждением:
а) при введении добавочного сопротивления tf цепь возбуждения; б) при изменении иалряжения подводимого к цепи якоря
Моментная характеристика или зависимость момента вращения от тока якоря при указанном допущении также есть прямая линия. С учетом размагничивающего действия реакции якоря (уменьшения Ф) вращающий момент пропорционален току якоря а степени а lt;1
М = kll (2.47)
Из (2.47) следует, что ток и мощность якоря пропорциональны моменту вращения в степени большей единицы.
Механические характеристики можно построить по паспортным данным двигателя и значению сопротивления цепи якоря. Характеристика строится по двум точкам: идеального холостого хода с координатами п = п, М = 0 и номинальной нагрузки со значениями п = и = Ж . Скорость при холостом ходе
Номинальная скорость
г/н-/н(/-я + /-д)
-Из отношения этих скоростей получаем:
(2.48)
Поскольку в каталожных данных сопротивление цепи якоря не дается, его определяют приближенно, задаваясь отношением постоянных и переменных потерь при номинальной нагрузке. Например, при равенстве этих потерь имеем:
- 9 - 9
Откуда сопротивление цепи якоря
(2.50)
Торможение двигателей постоянного тока. На рис. 2.18 изображены принципиальные схемы, а также направления действия электромагнитных моментов (М) и моментов механизма (Мс) в двигательном (рис. 2.18, е) и тормозных режимах а)
-19 0+ - ф
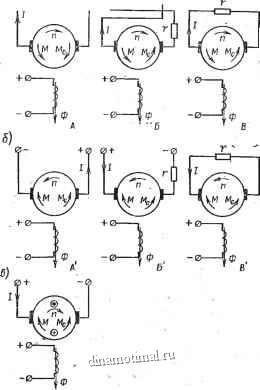
Рис. 2.18. Схемы и направления моментов в двигательном и тормозных режимах
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




