 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
, sect; 2. 11. ] исполнительных шкродвигателей постоянного тока
Машины постоянного .тока малой мощности широко применяются в качестве исполнительных двигателей различных автоматических устройств, в частности следящих систем. Они имеют независимое возбуждение и управляются изменением напряжения, подводимого к якорю. Вращающий момент такого двигателя без учета размагничивающего действия реакции якоря и магнитного насыщения
(а - ССфП).
(2.53)
Здесь Ф = Сфл, а =коэффициент управления или регулирования. Максимальный вращающий момент
СиСфЩ
(2.54)
при-п=0.и а=1.
Разделив (2.53) на (2.54), имеем в относительных единицах:.
Здесь =
[1 = а - ССфН, = а - V или v = а - [i. М
(2.55)
максимального пускового момента;
V = -2- скорость вра-
щения якоря в долях скорости идеального холостого хода laquo;о-
Механическая характеристика V = (р (ji) для различных постоянных значений а и регулировочные характеристики v = = lt;р (а) при постоянных
-jnp--вращающий момент, выраженный в долях
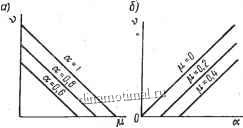
Рис. 2.21. Характеристики микродвигателя с независимым возбуждением: а) механические; б) рвгулировочиые
величинах момента представлены на рис. 2.21,а и 2.2.1,6.
Исполнительный двигатель малой мощности характеризуется: а) широкими пределами регулирования скорости; б) малой инерционностью (электромеханической постоянной времени), обеспечивающей сравнительно быстрое протекание переходных
процессов; в) значительным изменением скорости вращения при изменении нагрузки от холостого хода до номинальной (до 30%) вследствие относительно большого падения напряжения в цепи якоря; г) большой кратностью пускового вращающего момента. Механическая мощность двигателя
Яр = vfx = av - v2. . (2.56)
Зависимость мощности от скорости вращения имеет максимум, для которого справедливо
= 0.
Скорость вращения, соответствующая этому максимуму,
v = v = 0,5a. (2.57)
. Значение максимальной мощности
Рр , = 0,25а (2.58)
Эта мощность пропорциональна квадрату коэффициента управления а.
, . sect; 2. 12. Характеристики
двигателей постоянного тока последовательного возбуждения
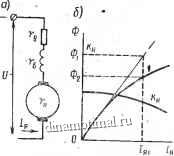
Последовательное соединение обмоток возбуждения и якоря определяет непосредственную зависимость магнитного потока от тока якоря Ф==ф(/ ) и соответствующие характеристики этого двигателя (рис. 2.22). Уравнения характеристик, записанные ранее в.общем виде, справедливы и в данном случае:
M = cJ,Ф = cJ,{Q, (2.59)
и - 1 (я + / в + д) 2 50)
п =
Рис. 2.22.Двигатель постоянного -тока с последовательным возбуждением:
а) схема; б) кривая намагничиоа-вия и коэффициент магнитного насыщения
Нелинейная зависимость потока от тока возбуждения вы-)ажается в виде кривой Ф = ср (/ ). 1ри слабой размагничивающей реакции якоря-эта кривая почти совпадает t кривой намагничивания. Двигатели с последовательным возбуждением работают в условиях значительного маг-
1ГИТН0Г0 насыщения. Обозначим через k - Фг/ reg;! переменный коэффициент магнитного насыщения (рис. 2.22,5). Очевидно, что Ф1 = al;
Ф2 = Ф, =aV laquo;;
(2.62) (2.63)
(2.64)
Подставляя (2.62) в (2.60) и (2.64) в (2.61), получим:
/-/я(Гя + Гв + /-д)
(Г + /-В + /-д)
(2.65) (2.66)
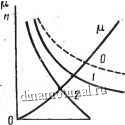
С увеличением тока якоря коэффициент насыщения уменьшается. Его значения находят по кривой Ф-ф(/ ). На рис. 2.23 показаны зависимости скорости враще ния и- момента от тока якоря. У этого двигателя скорость и момент вращения сильно зависят от тока якоря в особенности при малых нагрузках. При холостом ходе скорость вращения достигает большой величины, практически не до бесконечности, как следует из формулы (2.66), а до 3-6-кратного номинального значения вследствие наличия механических потерь, остаточного магнитного потока и некоторых магнитных потерь. Пусковой момент вращения у двигателя последовательного возбуждения выше,
чем у двигателя параллельного возбуж-
. дения с тем же номинальным моментом и мощностью. Это положение вытекает
,:из зависимости (2.63). Здесь при пуске возрастают ток якоря и магнитный поток, тогда как в двигателе с параллельным возбуждением магнитный поток несколько снижается при большом пусковом токе. Для расчета характеристик двигателей последовательного возбуждения необходимо знать зависимость ф = ф(/я) или = lt;Р (я)- Практически используют экспериментальные Кривые laquo;= ф (/ ) и М = lt;о (/я) или универсальные кривые в относительных единицах v = 9 (г) и А=:(р(г), приводимые В каталогах. Естественная механическая характеристика двигателя находится по точкам п, М, соответствующим ряду
Рис. 2.23. Зависимость момента и скорости вращения. от тока якоря двигателя последовательного возбуждения:
О - пограничная скоростная .хараетеристика; 1- ёстественн-ая скоростная характеристика; 2 - иокуоотвенная снорост-иая характеристика
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




