 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 [ 19 ] 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
значений тока. Искусственные характеристики при наличии добавочного сопротивления в цепи якоря можно найти по естественной характеристике следующим образом. Из (2.60) при /я = О получаем формулу для пограничной скорости
п. = . (2.67)
Разделив (2.67) на (2.60) для случая Гд=0, получаем пограничную скорость, выраженную через скорость, и ток, соответствующие естественной характеристике
-(2-68)
Уравнение искусственной характеристики
J 4 (/-я ++/-д)
(2.69)
Зная зависимость момента от тока, данную в каталоге, от скоростной характеристики, можно перейти к механической.
Возможности торможения двигателей последовательного возбуждения более ограничены, чем у двигателей независимого возбуждения. Рекуперативное торможение этих двигателей в естественных условиях невозможно вследствие того, что нельзя превзойти скорость холостого хода и повысить э. д. с. якоря до величины, большей его напряжения. В этом случае двигатель переключается с последовательного на независимое или 1араллельное возбуждение и работает по принципу, рассмотренному ранее. Торможение противовключением реализуется тогда, когда сохраняется направление потока возбуждения. Если торможение происходит без перемены полярности напряжения якоря, то при изменении направления вращения и достаточном добавочном сопротивлении в якоре машина может перейти в режим самовозбуждающегося генератора. Динамическое торможение, осуществляемое по схемам независимого возбуждения и с самовозбуждением, также требует выполнения основного условия - постоянного направления основного потока. Участок механической характеристики этого двигателя в режиме торможения противовключением рассчитывается по предыдущим формулам и располаг-ается в квадрантах IV и II (рис. 2.24). Торможению механизма с активным статическим моментом отвечает участок, расположенный в квадранте IV, а реактивному - в квадранте II.
Характеристику машины в режиме динамического торможения можно рассчитать, исходя из уравнения напряжений цепи якоря, замкнутого на сопротивление Гт
Е=с,пФ = 1г,г,-\-г. (2.70)
при торможении по схеме с независимым возбуждением приближенно можно считать, что Ф = const и скоростная характеристика - прямая линия, проходящая через начало координат:
/я (гя + + /-ffi)
(2.71)
При торможении по схеме с самовозбуждением
-я + +
аСеК (/я)
(2.72)
Критическая скорость, при.которой теряется самовозбуждение и исчезает тормозной электромагнитный момент, наступает при
/ = 0, н(/я) = 1,0,
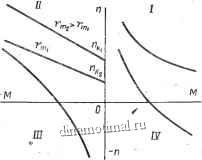
Рис. 2.24. Характеристики двигателя последовательного возбуждения в разных режимах работы
Гя + Гв+Г
аср gt;
(2.73)
Наименьшее значение этой критической скорости будет при т=0. Выражая скорость при динамическом торможении через пограничную скорость
получим:
M,kJ (/я) /я
(2.74)
Механические характеристики при торможении по схеме с самовозбуждением для различных сопротивлений в цепи якоря показаны на рис. 2.24 в квадранте II. . В процессе эксплуатации характеристики двигателя могут -отклоняться от естественных вследствие изменения напряжения V на зажимах двигателя. . gt;
sect; 2. 13. Характеристики двигателей смешанного
Обладая двумя обмотками возбуждения - параллельной и последовательной, двигатели смешанного возбуждения по своим свойствам занимают промежуточное положение. В зависимости от отношения н. с. обмоток возбуждения характеристики этих.двигателей в большей мере приближаются к харак-.теристикагЛ двигателей параллельного или последовательного
It - . СП
возбуждения. Скоростная характеристика без учета реакции якоря
и-.1Лг + Гш + г
п =
(2.75)
Здесь поток последовательной обмотки является непосредственной функцией нагрузочного тока Ф1=ф(/), а поток параллельной обмотки неизменного сопротивления - функцией приложенного к ней напряжения Ф2=ф(С/) raquo; Последний можно считать почти постоянным ввиду малого изменения напряжения. В связи с тем что в машине смешанного возбуждения имеется значительное магнитное насыщение, вызывающее нелинейный характер зависимости потока от ока, построение механических характеристик обычно, проводится на основе экспериментальных кривых заводов-изготовителей п={1) и M=f(/ ) или г=ф(г ) и [x=r/(i ), выраженных в абсолютных или относительных единицах. Такие универсальные кривые и построенные по ним механические характеристики изображены на рис. 2.25, а и ри,с. 2.25, б. Скорость вращения при малых наТгруз-ках зависит от момента, затем при его увеличении снижается

Рис.- 2.25. Характеристики двигателя смешанного возбуждения:
а) универсальные; б) мехавичеокие
почти по линейному закону вследствие магнитного насыщения. При больших сопротивлениях в цепи якоря механические характеристики- более мягкие и располагаются в квадранте IV (см. рис. 2.25,6). В механизмах с потенциальным моментом сопротивления электропривод,-таким образом, переводится из двигательного режима в тормозной (например, подъем и спуск груза). К двигателю смешанного возбуждения применимы все три основные способа торможения: рекуперативное, противовключением и динамическое. Возможность рекуперативного торможения обеспечивается параллельной обмоткой возбуждения.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 [ 19 ] 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




