 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [ 28 ] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
sect; 3. 9. Бесконтактные командоаппараты
Звенья систем управления - датчики, конечные и путевые выключатели без подвижных контактов - выполняются на магнитных и полупроводниковых элементах. В качестве примеров рассмотрим индуктивный датчик-выключатель и сельсинный командоаппарат.
Индуктивный выключатель-датчик. Выключатели-датчики работают в качестве путевых и конечных выключателей, посы- лающих электрические сигналы на вход схемы управления при заданных положениях механизма. Эти сигналы преобразуются логическими элементами (реле) в команды исполнительным органам. На практике весьма распространены, простые по к0н7 струкции и надежные в работе, электромагнитные (индуктивные) выключатели-датчики с различными формой магнитопровода и схемой включения. Эти датчики имеют сравнительно большую выходную мощность, чем датчики других типов. На рис. 3.11, а приведена мостовая схема индуктивного датчика
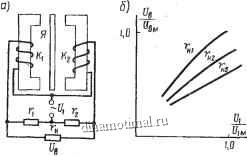
Рис. 3.11. Индуктивный датчик-выключатель: а) мостовая схема; б) характеристики
С П-образной магнитной системой. Действие датчика основано на изменении индуктивности его катушки при изменении воз-t душного зазора между сердечником и якорем, передвигаемым движущимся механизмом. Индуктивность катушки
(3.1)
- магнитная проводимость стали и воздушного зазора;
Gp - магнитная
Rmc. к Ri ~ магнитные сопротивления тех же участков;
проводимость путей потока
рассеяния.
Перемещение якоря Я увеличивает индуктивность той ка-тущки, в которой зазор уменьщается и снижает ее в противо- положной цепи, где зазор возрастает. Включенные в плечи мо- lt;:товой схемы индуктивности вызывают разбаланс моста и сигнал в виде нагрузочного тока и напряжения и-
Зависимость выходного напряжения датчика от напряжения питания в относительных единицах, когда якорь находится Бодном из крайних положений, изображена на рис. 3.11,6. С увеличением напряжения питания выходное напряжение почти пропорционально возрастает, в области же насыщения оно изменяется незначительно. Датчик этого типа имеет малые габариты и достаточную выходную мощность для срабатывания .логического элемента. Прибор надежен в работе, но нуждается Б наладке при монтаже.
Бесконтактный сельсинный командоаппарат. Сельсинные жомандоаппараты с выходом на постоянном токе предназначаются для управления реверсивными электроприводами аналогичного рода тока. Основной частью аппарата является сельсин, схема которого показана на рис. 3.12. Однофазная первичная обмотка питается от сети переменного тока, к двум вторичным обмоткам через диоды Дх и Дг подключена нагрузка !(например, обмотка управления МУ), третья обмотка присоединена к средней точке сопротивлений rj и Гг, зашунтированных конденсаторами Ci и Cg для снижения пульсаций выходного напряжения.
Установим, как зависит выходное напряжение Уаь от угла :поБорота ротора сельсина в предположении, что нагрузка и конденсаторы отключены, прямое сопротивление и обратная проводимость вентилей, а также падение напряжения во вторич-.ной обмотке и ее реакция равны нулю.
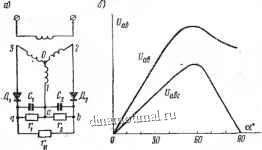
Рис. 3.12. Бесконтактный сельсинный командоаппарат:
а) схема; 6) напряжения в фуикции угла поворота
Мгновенные фазные напряжения вторичной обмотки сельсина:
Ki = f7; cosasinuj, 1
щ = Zycos (а + 120 deg;) sin (Of, (3.2)
laquo;3 = Z7;;,cos(a-120 deg;)sin(o, .
где = y- Un - амплитуда напряжения фазы при совпадении ее оси с осью первичной обмотки, f/j - действующее линейное напряжение трехфазной обмотки; а - угол поворота ротора сельсина. Линейное выходное напряжение при отсутствии вентилей
laquo; laquo;6 = Щс - Час = laquo;6 - ti,. (3.3 gt;
Если имеются вентили, то напряжения и щ возникают в цепи нагрузки при таких углах а. и когда они положительны и по величине больше или отрицательны, но меньше положительного значения Напряжение Kg будет в цепи нагрузки лишь при О lt; а lt; 150 deg; и тг lt; (of lt; 2it. Напряжение возникает во внешней цепи, когда 30 deg; lt; а lt; 60 deg; и л lt; tof lt; 2it; Б этот полупериод, если 30 deg; lt;а lt;60 deg;, ток протекает во внешнюю цепь; то же при 60 deg; lt; а lt; 120 deg; и О lt; lt; тг.
Среднее значение выходного напряжения при а = О - 60 deg;
(U2-U,)d{) = ~sinj (ЗА),
к уз
и ~1~
в случае 60 deg; lt; с lt; 90 deg; ток во внешней цепи протекает оба полупериода и напряжение
COSa. (3.5 gt;
Действующее значение напряжения при О lt; с. lt; 60 deg; при 60 deg; lt; а lt; 90 deg;
аь- Usmo., (3.6 gt;
и -
ab = Кб + 3 COS 2а. (3.7)
Среднее и действующее выходные напряжения в функции угла поворота ротора сельсина, соответствующие формулам (3.4) и (3.7), приведены на рис. 3.12,6. Полярность выпрямленного напряжения изменяется на противоположную, если ротор поворачивается в обратную сторону (а - отрицательно)..
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [ 28 ] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




