 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [ 30 ] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
Б цепях якоря через замкнутые накоротко щетки протекает ток
1, = , (3.10 gt;
где Гд - сопротивление поперечной цепи якоря, включая щеточные контакты.
Этот ток создает поперечный неподвижный магнитный поток
, = \Раа. (3.11)
j. где - - магнитная проводимость по поперечной оси;
Faq == kgNIg - намагничивающая сила якоря по поперечной оси.
Э. д. с, наводимая в обмотке якоря, пересекающего этот поток, имеет максимальную величину на продольных щетках
Е = с,пФд. (3.12)
В цепи продольных щеток, замкнутых на нагрузку, протекает ток
здесь у- = (Гд -f -f Гд) - сопротивление продольной цепи якоря, компенсационной обмотки и дополнительных полюсов. Напряжение на продольных щетках
и,Е,-1,г,. (3.14)
Ток нагрузки образует продольный магнитный поток якоря Фай, способный подавить обратный ему по направлению поток обмоток управления. Для устранения встречного продольного потока якоря предусмотрена компенсационная обмотка К., включенная последовательно с ним. Намагничивающая Сила этой обмотки может регулироваться изменением параллельно присоединенного к ней сопротивления. Добавочные полюса по продольной оси служат для улучшения коммутации в секциях, закорачиваемых продольными щетками. Подмагнй-чивающая поперечная обмотка П, поток которой направлен согласно с основным поперечным потоком, позволяет снизить ток по этой оси и ослабить чувствительность выходного напряжения к изменениям сопротивления щеточных контактов.
ЭМУ имеет две ступени усиления: первая 1уФ-Е -1
вторая Фд-Е-/-и. Общий коэффициент усиления мощности равен произведению его составляющих:
Uyly
Uyly
Udld E,I,
(3.15)
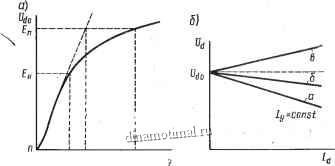
В установившемся режиме свойства ЭМУ описываются его основными статическими характеристиками. К их числу относятся характеристика холостого хода, внешние характеристики .и коэффициент усиления мощности. Характеристика холостого Jioдa усилителя показана на рис. 3.14, а.
Гун 0,51уп Гуп /,
Рис. 3.14. Характеристики электромашинного усилителя; а) холостого хода; б) внешние
Влияние гистерезиса на выходное напряжение должно быть весьма малым. Наличие остаточной магнитной индукции вызывает остаточное напряжение при нулевом токе управления, которое может привести в ложное вращение исполнительный двигатель следящей системы. Явление гистерезиса и вызываемые им отрицательные последствия практически ослабляются применением статора шихтованной конструкции. Остаточное выходное напряжение равно около 5% от номинального напряжения. Более сильным средством, ослабляющим гистерезис и остаточное напряжение, является размагничивание ярма статора переменным током с помощью обмотки, размещенной на ярме между полюсами.
В режиме холостого хода в усилителе действуют следующие размагничивающие факторы: продольная н. с. коммутируемых секций, закорачиваемых накоротко поперечными щетками F кп. продольная составляющая н. с. якоря при сдвиге поперечных .щеток f щ , размагничивающая или намагничивающая в зави-
симости от направления смещения щеток. Результирующая н. с. в режиме холостого хода
F = F,-{F + FJ. (3.16)
Величина этой суммарной н. с. определяет значение э. д. с. холостого хода. В нормальных .условиях ЭМУ ненасыщен, точка его номинального напряжения находится на конце прямолинейного участка характеристики холостого хода. В условиях же форсировки возбуждения, иногда осуществляемого для ускорения протекания процессов, ЭМУ работает в области магнитного насыщения (см. рис. 3.14,а). Внешние характеристики ЭМУ Ud-(pild) при неизменном токе управления и скорости вращения приведены на рис. 3.14,6. Выходное напряжение выражается уравнением (3.14). В общем случае магнитный поток и э. д. с. Ed при нагрузке отличаются от их значений при холостом ходе вследствие неравенства продольной н. с. реакции якоря и встречной н. с. компенсационной обмотки Fad, Рк- Результирующая н. с. при нагрузке по продольной оси
F = Fa,-F, + F,. (3.17)
Здесь возможны три характерных случая: а) недокомпенсация
lt; Fad; б) полная компенсация Е = Е; в) перекомпенсация Fk gt; Fad- Этим случаям соответствуют зависимости й, 6 и б на рис. 3.14, б.
Таким образом, жесткость внешней характеристики зависит от степени компенсации. Она может регулироваться посредством изменения сопротивления, включенного параллельно компенсационной обмотке.
На практике ЭМУ работает обычно в условиях малой недо-компенсации (/к lt;ай), при которой выходное напряжение несколько снижается с возрастанием нагрузки. Перекомпенсация усилителя может вызвать самовозбуждение, нарушающее его нормальную работу.
Важнейшим показателем ЭМУ является его коэффициент усиления. Без учета падения напряжения
k,.- (3.18)
Подставляя (3.8) (3.13) в (3.18), получим:
clk ,lNnVd
Для заданных величин параметров коэффициент усиления пропорционален произведению квадрата скорости вращения якоря на отношение токов на выходе и входе. Формулу (3.19) можно представить в другом виде, если ввести новые параметры:
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [ 30 ] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




