 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 [ 4 ] 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
Глава I ОСНОВЫ МЕХАНИКИ ЭЛЕКТРОПРИВОДА
в процессе работы электропривода механическая энергия, развиваемая электродвигателем, расходуется на, приведение в движение элементов рабочей машины, осуществляющей рабочий процесс. Этот процесс, согласно условиям производства и технологии, протекает нередко с переменной скоростью. Скорость электропривода может меняться также вследствие коле- бания механической нагрузки рабочей машины и непостоянства напряжения сети. Всякое изменение скорости электропривода вызывает изменение запаса кинетической энергии во всех движущихся массах системы двигатель - рабочая машина. Эте обстоятельство в ряде случаев является причиной непостоянства тока, момента и мощности двигателя, величины которых зависят от характера движения электропривода.
Изучение характера движения электропривода производится при помощи решения уравнения движения и исследования влияния различных величин, входящих в это уравнение.
sect; 1. 1. Уравнение движения электропривода
В электроприводах, как правило, приходится иметь дело с вращательным движением. Поэтому уравнение движения записывается как уравнение равновесия всех моментов:
-е = У + -, (1.1)
Где УН -вращающий момент электродвигателя, дж\
УИс - статический момент рабочего механизма, приведенный к валу двигателя, дж\
+ У 57 ~ динамический, инерционный момент, дж;
У - момент инерции системы, приведенный к валу двигателя, дж сек;
do) 4,9
--угловое ускорение,
da .,
ш = - угловая скорость, IjceK;
а - угол поворота, рад; t - время, сек.
Для большинства рабочих механизмов й машин, имеющих постоянный момент инерции, выражение (1.1) примет вид
Ж-УИе = /-. , (1.2)
Из уравнения моментов следует, что характер движения привода определяется соотношением величин и знаков момента двигателя и статического момента.
При М gt;М ускорение - gt;0, т. е. имеет место ускорение привода.
При М lt;М ускорение lt;0, т. е. происходит замедление привода.
При М=Мс ускорение -=0, т..е. привод работает в уста-
новившемся режиме.
Исходя из вышеизложенного в (1.2) следует правильно учитывать знаки, стоящие перед моментами М и М. Движущий момент М, развиваемый электродвигателем, принимается положительным, если его действие совпадает с направлением вращения, которое условно принимают за положительное. Если момент М направлен навстречу движению (при торможении), то он считается отрицательным.
- Моменты, действующие на валу двигателя, делят на две группы: статические и динамические.
Различают активные и реактивные статические моменты. Активные статические моменты обусловлены потенциальными силами (например, силами тяжести), не меняют направления своего действия при изменении направления движения, вследствие чего они могут способствовать или противодействовать движению. Реактивные моменты сопротивления препятствуют движению привода при любом направлении движения, так как изменяют направление своего действия, когда меняется направление скорости.
Таким образом, учитывая возможные знаки движущих . и статических моментов, уравнение движения электропривода
plusmn;M + Mc = J~. (L3)
Не рассматривая подробно вопроса об определении момента сопротивления исполнительных механизмов, отметим, что для некоторых механизмов, имеющих вращательное движение, выражение момента сопротивления в зависимости от скорости имеет следующий вид:
Ж, = М, + (УИе -Ж,)(-) .,
(1.4)
момент сопротивления исполнительного механизма при скорости п;
момент сопротивления трения при п = 0; момент сопротивления при номинальной скорости вращения;
номинальная скорость;
коэффициент, зависящий от характера нагрузки. Если х=0, то момент ММсн не зависит от скорости. Такой характеристикой обладают подъемные краны, конвейеры и др.
При х=1 момент сопротивления пропорционален скорости п. Примером такой зависимости является натяжение пружины. Если х=2 (рис. 1.1), то момент сопротивления пропорционален квадрату относительной скорости (вентиляторная характеристи-. ка). К механизмам, имеющим подобную характеристику, относят центробежные насосы, вентиляторы и т. п.
Многие механизмы имеют момент на валу, зависящий одновременно от нескольких-аргументов. В этом случае весьма трудно найти аналитическое выражение для определения момента сопротивления и приходится прибегать к графическому laquo;ли графо-аналитическому методам, а также опытным данным. Динамический момент характеризует сопротивление тела его ускорению. При ускоренном движении тела динамический момент направлен против движения, а при замедленном - по направлению движения.
Момент инерции электропривода ~ -
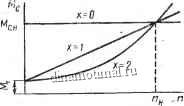
Рис. 1.1. Зависимость момента сопротивления исполнительного механизма от скорости вращения
J = тр -
гда /га-масса тела, кг;
р - радиус инерции, м; jD -диаметр инерции, м; = 9,81 м1сек\
| 1 2 3 [ 4 ] 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




