 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 [ 40 ] 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
г в) при 2i = l ?Ci И 2о.с = о.с (рис. 3.30, в) схсма выполняет функцию дифференцирования:
г) когда Zi = и 2-0. с = Го. с/1 + рТо. с, где Го. с = / о. с Со. с (рис. 3.30, г), усилитель, является инерционным звеном,
*ц д) в случае Zl = rj и z:o.c= (рис. 3.30,) усили-
о. с
тель осуществляет пропорционально-интегральное регулирование:
oi - f\ Co. (
Ч г.
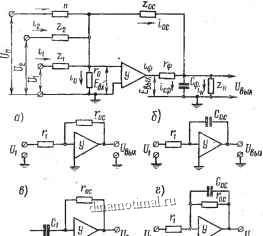
Рис. 3.30. Схемы операционных усилителей
е) если gi = 1 .! р7д и Zo. с = (рис. 3.30, е), то
усилитель реализует пропорционально-интегрально-дифферен-диальное регулирование:
{Ц1+ gt;+,Ц1)и,. (3.40)
-Здесь Ti - rCi, To.с - to. с Co. с, qj, - гСо. с-
к основным устройствам блочных систем принадлежат различные датчики: напряжения постоянного тока, скорости, положения, магнитного потока, динамической составляющей тока и интенсивности, а также командоаппараты. Двухполупериод-ный датчик напряжения состоит из модулятора, трансформатора и демодулятора (фазочувствительного выпрямителя). С помощью промежуточной модуляции гальванически разделяются цепи входного и выходного напряжения. Датчиками скорости являются прецезионные тахогенераторы. Датчиками положения- стандартные сельсины и бесконтактные вьпмючатели. .Датчик магнитного потока, включающий датчик э. д. с. Холла и усилитель постоянного тока, дает напряжение на выходе, пропорциональное магнитному потоку. Датчик динамического тока, содержащий датчик э. Д. с. и усилитель постоянного тока с дифференцирующим контуром на входе, вырабатывает выходное напряжение, пропорциональное динамической составляющей тока двигателя.
В качестве командоаппаратов ручного и педального управления используются серийные сельсины п фазочувствительные выпрямители.
Универсальные блочные системы имеют ограниченное число блоков, датчиков и регуляторов. Они образуются из отдельных унифицированных устройств, называемых модулями. К модулям относятся: нестабилизированные и стабилизированные источники питания, генераторы коммутирующего напряжения, усилители переменного тока, демодуляторы и др. Источниками нестабилизированного питания являются выпрямители с выходными напряжениями 12 и 24 е и токами до 300 ма. Они предназначаются для питания датчиков и усилителей с промежуточной модуляцией входного сигнала. Стабилизаторы с выходным напряжением 24 в и током до 400 ма питают усилители постоянного тока.
Генератор коммутирующего напряжения, преобразующий постоянное напряжение в импульсы прямоугольной формы, служит для управления модуляторами и демодуляторами (рис. 3.31, й). Два транзистора, работающие в режиме ключа, подводят постоянное напряжение с прямой и обратной полярностью к первичной обмотке / трансформатора, во вторичных
обмотках которого создаются переменные напряжения практически прямоугольной формы.
Полупроводниковый модулятор (рис. 3.31,6), состоящий из четырех транзисторов, преобразует входное постоянное напряжение сигнала иу, в переменное напряжение пропорциональной амплитуды.
Затем напряжение переменного тока снова преобразуется в напряжение постоянного тока посредством демодулятора (рис. 3.31, е), полярность которого зависит от знака входного
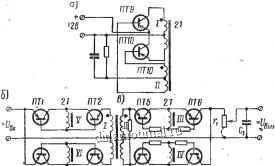
ПТЗ 2Т пп IT ПТ7 ZT птв
Рис. 3.31. Схемы датчика напряжения
сигнала, а величина - от амплитуды входного переменного напряжения.
Демодулятор состоит из двух пар встречно включенных транзисторов, обеспечивающих двустороннюю проводимость при отрицательном потенциале на базах. Управление транзисторами осуществляется также генератором коммутирующего напряжения. На выходе усилителей постоянного тока включаются фильтры, сглаживающие пульсации выходного напряжения. Полярность этого напряжения зависит от фазы коммутирующего и знака сигнального напряжения.
Рассмотрим кратко лишь некоторые устройства - датчики напряжения и тока. Посредством датчика напряжения (см. рис. 3.31) в систему управления передается величина, пропорциональная напряжению двигателя. На вход датчика подается сигнальное напряжение f/вх, которое преобразуется в переменное напряжение прямоугольной формы, частотой 8-10 кгц, двухполупериодным модулятором, управляемым коммутирующим генератором. Обмотки V и VI его трансформатора 2Т (равным образом и обмотка / трансформатора IT) электрически отделены от выхода и имеют изоляцию на 1 кв. Переменное прямоугольное напряжение затем снова преобразуется в пропорциональное по величине постоянное напряжение. Посредством
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 [ 40 ] 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




