 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [ 42 ] 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
Амплитуды огибающих кривых э. д. с. в соседних фазах смещены на угол 120 deg;. Э. д. с. на зажимах обмотки статора сельсина-датчика:
12 = 2 - 23 = lt;?3 - 2 И - 3.
Напряжения, соответствующие этим э. д. с, подводятся к входным зажимам сельсина-трансформатора. Токи, вызываемые этими напряжениями, создают магнитный поток в сельсине-трансформаторе, совпадающий по направлению с осью обмотки возбуждения. При угле а=0 напряжение на зажимах 2-3 равно нулю. Это положение называется электрическим нулем сельсина-датчика. Для действующих значений э. д. с. аналогично имеем:
= cos а;
Е2 = Есо8{а-т deg;); (3.42)
Es = Ecos {а- 240 deg;),
где Е - наибольшее действующее значение фазной э. д. с. Эти э. д. с. вызывают токи в фазных цепях сельсинов:
/i = /,= = A/2Cos(p - 120 deg;); (3.44)
= /зС08 (р-240 deg;).
Здесь X - индуктивное сопротивление, обусловленное взаимоиндуктивностью обмотки статора и ротора сельсина-трансформатора; р -угол между осями обмотки статора / и управляющей обмотки ротора.
Результирующая э. д. с. управляющей обмотки равна сумме ее составляющих:
Еу Еу -[- Et Е, После подстановки и преобразования имеем:
=4 й = -
где 6 = (а-р) -угол рассогласования сельсинов.
Соответственно для напряжения на зажимах управляющей обмотки
Uy=UnCosB. (3.46)
Обычно за согласованное положение роторов сельсинов принимают такое, при котором управляющее напряжение равно нулю, что соответствует углу рассогласования в 90 deg;. В этом случае 6 = 6j - 90 deg;, так как ошибка отсчитывается от положения рассогласования, равного 90 deg;:
C/y = C4cos(Oi-90 deg;) = C/sinGi. (3.47)
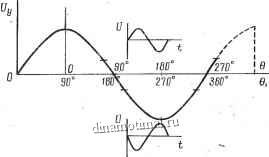
Это уравнение показывает, что выходное электрическое напряжение сельсина-трансформатора, пропорциональное синусу разности углов роторов сельсинов, является мерой механического рассогласования их роторов. Кривая выходного напряжения сельсина в функции угла рассогласования, приведенная на рис. 3.34, показывает, что при любом заданном угловом поло-
Полярность
Полярность
Рис. 3.34. Выходное напряжение сельсина-трансформатора-
жении сельсина-датчика возможны два положения сельсина-трансформатора с нулевым выходным напряжением обмотки ротора, смещенных одно относительно другого на 180 deg;. Они отличаются тем, что при повороте ротора из этих положений в каком-нибудь одном направлении появляются выходные напряжения противоположной полярности. При этом изменение направления пово.рота ротора вызывает перемену полярности указанных напряжений.
Для сельсина-трансформатора характерной величиной является крутизна зависимости Uy = ср (Gi) в начале кривой или чувствительность по напряжению
Ки = -
(3.48)
Эта величина для сельсинов равна примерно 1 в/град.
Индикаторный режим работы сельсинов существенно отличается от трансформаторного. В этой системе обмотка ротора сельсина-приемника, так же как и подобного ему по устройству

сельсина-датчика, возбуждается от сети переменного тока, а одноименные фазные обмотки статоров соединены между собой (рис. 3.35). Если повернуть ротор датчика на некоторый угол или вращать его с определенной скоростью, то ротор приемника следует за ним с некоторым углом рассогласования под действием синхронизирующего вращающего момента. Так как фазные обмотки сельсинов включены встречно, то результирующие э. д. с. в цепях равны разности э. д. с

=Е cos/3
Рис. 3.35. Сельсины в индикаторном режиме обмоток датчика и приемника:
AjEi = cos Р - cos а = 2Е sin sin
- = 2Sin - 120 deg; ) Sin
(3.49)
АЕ, = 2 sin - 240 deg; ) sin
Эти э. д. с. вызывают уравнительные токи в фазовых цепях статоров. Взаимодействие поперечной составляющей результирующей н. с. статора с потоком ротора приемника определяют значение его синхронизирующего электромагнитного момента. Синхронизирующий момент сельсина-приемника (дж) при малых углах рассогласования
yi4yi4 ,sine.
(3:50)
Максимальное значение синхронизирующего момента (дж)
(3.51)
наибольшее значение действующей э. д. с. одной фазы;
Гд и .АГ-активное и индуктивное сопротивление фазы об-мотки статора приемника по поперечной оси; laquo;1 - круговая частота цепи возбуждения. Аналогичный вращающий момент, но противоположного направления, возникает и в сельсине-датчике.
Величина максимального синхронизирующего момента сельсина имеет существенное значение для системы синхронной пе-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [ 42 ] 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




