 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 [ 45 ] 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
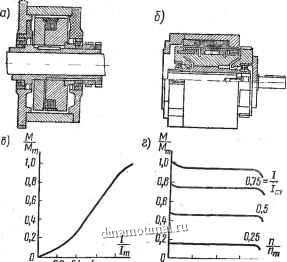
ковым наполнителем. Наиболее распространены на практике .униполярные муфты, у которых ось обмотки возбуждения совпадает с осью вращения. По форме рабочей поверхности они бывают цилиндрическими и дисковыми с одним или йескольки-ми рабочими зазорами; в зависимости от типа токопровода - с контактными кольцами и бесконтактные. Схемы униполярных ферропорошковых муфт: простой по конструкции с одной цилиндрической рабочей поверхностью и контактными кольцами и более сложной с двумя цилиндрическими рабочими поверхностями без контактных колец, приведены на рис. 3.39, я и б.
0,2 0.4 0,6 0,8
0,25 0,5 0.75
Рис. 3.39. Ферропорошковые муфты:
а) с контактными кольцами; б) беокоитактная; в, г) характеристики
Как уже отмечалось, процесс образования связи между ведущим и ведомым частями муфты основывается на электромагнитных и механических силах, действующих в ферромагнитной среде, оказывающих непосредственное влияние на ее вязкость и передаваемый момент вращения. Последний для муфты с одной цилиндрической поверхностью
MSR, (3.60)
где ti = (р {Iw) - удельная сила сцепления на поверхности цилиндра рассматриваемой муфты, зависящая от н.с. возбуждения; S - поверхность рабочего цилиндра; R- радиус рабочего цилиндра.
Примерная зависимость вращающего момента от тока возбуждения, а также механические характеристики ферропорощ-ковой муфты показаны на рис. 3.39, е, г. Механические характеристики этого типа муфты занимают промежуточное положение между характеристиками муфты сцепления и скольжения. Рабочие характеристики таких муфт , менее стабильны, чем других ввиду изменения свойств наполнителя в процессе эксплуатации.
Общее сопоставление параметров и характеристик электромагнитных муфт. Кратность максимального момента МтМ, характеризующая перегрузочную способность, выше у муфт скольжения (1,23,0) и ферропорошковых муфт (в среднем 1,3), чем у муфт сцепления (1,1). Коэффициент усиления Рг/Ру, имеющий важное значение для системы управления, более высок у муфты сцепления и достигает величины порядка 10*. Для работы в релейном режиме выбираются фрикционные и ферропорошковые муфты. Они являются наиболее быстродействующими: время включения 0,03-Ь0,3 сек, время етключения 0,01+0,3 сек. Число срабатываний может достигать 70.0 в час. Механические характеристики показывают, что в отношении регулирования скорости вращения сравнительно лучшими возможностями обладают муфты скольжения. Регулирование скорости посредством муфт сцепления практически исключается. Рабочие свойства электромагнитных муфт определяют их области применения. Муфты сцепления, работающие в двух крайних режимах laquo;включено - выключено raquo;, используются в приводах подач с ограниченными перемещениями, в следящих системах и счетно-решающих устройствах. Муфты скольжения, как отмечалось ранее, применяются для регулирования скорости вращения рабочих машин и механизмов и в других специальных установках. Ферропорошковые муфты с электромеханической связью могут работать без скольжения laquo;включено- выключено raquo;, а также со скольжением. Они используются в следящих системах, в приводах подач ограниченных перемещений, для пуска и торможения рабочих машин и- в других устройствах. Характеристики муфты должны быть согласованы с механическими характеристиками приводного электродвигателя и рабочего механизма.
Глава IV. МЕТОДЫ РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОПРИВОДОВ
sect; 4. 1. Классификация методов регулирования шрости
Проблема регулирования скорости вращения электроприводов имеет большое значение. В настоящее время существует много различных способов решения этой задачи. Дадим по возможности обобщенную классификацию методов регулирования скорости вращения всех типов электродвигателей. Исходными электромагнитными переменными, существенно влияющими на скорость двигателя, являются напряжение и, магнитный поток Ф и параметр х, г. Эти различные по природе электрические величины взаимосвязаны и взаимообусловлены, хотя и неодинаково в различных электромеханических системах.
Например, магнитный поток почти пропорционален напряжению в асинхронных и коллекторных машинах переменного тока с параллельным возбуждением при постоянной частоте. Тогда как в синхронных двигателях (при постоянной частоте) и двигателях постоянного тока с независимым возбуждением напряжение якоря влияет на поток вследствие изменения тока, зависящего от напряжения (при заданной нагрузке на валу) и реакции якоря. Однако наличие взаимосвязи между напряжением, потоком и параметром не лишает их фундаментального значения. Следующим важнейшим фактором является мера каждой электромагнитной переменной. Одна лишь величина не исчерпывает меры. В общем случае мера каждой фундаментальной переменной включает четыре составляющих: величину или амплитуду А, частоту напряжения f или скорость потока to, асимметрию а, относительную длительность действия е. Общий случай, ще могут проявиться все упомянутые четыре стороны (меры), относится к машинам переменного тока. В системах же постоянного тока мера содержит только две составляющие: величину и длительность действия. Главную роль играют - величина в машинах постоянного тока, величина (амплитуда) и частота (скорость) в машинах переменного тока.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 [ 45 ] 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




