 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 [ 49 ] 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
схемы пересоединения обмотки зависит от характера изменения нагрузки на валу. В двигателях, работающих с постоянным моментом на валу, широко применяется схема, изображенная на рис. 4.5, б. Для двигателей с постоянной мощностью на валу при различных скоростях приемлема схема, представленная на рис. 4.5, в. Если привод работает с постоянным моментом, необходимо выполнить условие Mi=M2. Но так как момент враще-
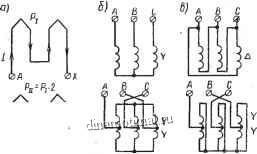
Рис. 4.5. Схемы переключения обмотки с одного числа пар полюсов на другое:
а) принципиальная; б) для постоянного момента; в) для посгоянной мощности
НИЯ почти пропорционален магнитному потоку одного полюса, то, очевидно, BiThBz, где В - магнитная индукция.
Если двигатель предназначен для работы с постоянной мощностью, то Pi = (OiMi = 0)22,
Ml: М2 = (Ug: =
Схемы, изображенные на рис. 4.5, примерно удовлетворяют этим условиям.
На рис. 4.6 показаны механические характеристики двухскоростного двигателя. Регулирование скорости асинхронного двигателя с короткозамкнутым ротором отличается сравнительно высоким к. п. д. и практически ограниченным до четырех числом ступеней скорости вращения. Большое число ступеней очень удорожает машину и усложняет переключатели.
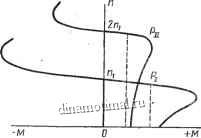
Рис. 4.6. Механичесю.1е характеристики двухскоростного двигателя с постоянной мощностью
sect; 4. 5. Регулирование скорости вращения асинхронных двигателей
с магнитными усилителями
Способ, основанный на изменении величины индуктивного- сопротивления в цепи статора, называется параметрическим. С увеличением индуктивного сопротивления в цепи статора снижаются: напряжение статора, критическое скольжение, максимальный момент и скорость вращения ротора. Удобно и просто изменяется индуктивность силового магнитного усилителя, рабочие обмотки которого включаются последо-. вательно в цепь стато-ра. На рис. 4.7 изображены принципиальная схема и семейство механических характеристик двигателя индуктивных сопротивлений.
Скольжение двигателя при разных напряженчях статора и номинальном моменте
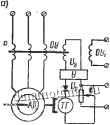
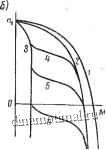
Рис. 4.7. Асинхронный двигатель с маг- , нитным усилителем:
а) схема; б) механические характеристики
С разными значениями
IX + (Л - 1) Е] + /р, ).(х 1)в]г-1
- (Хыг 1) е] 4- -Л [Хыг + (Хы 1) е]2 1
где и - {U: U) и е = : л,.
Повыщение критического скольжения можно получить изменением активного сопротивления цепи ротора. На практике повышение активного сопротивления наиболее просто достигается применением массивного ротора Шенфера. Используется также включение в цепь ротора дополнительного индуктивно-активного сопротивления. Зависимость индуктивного сопротивления от частоты ротора приближает механическую характеристику двигателя к экскаваторной.
Следует отметить, что повышение индуктивного сопротивления ротора снижает коэффициент мощности, повышает ток и -увеличивает нагрев двигателя при одинаковой нагрузке. Поэтому на практике предпочитают повышение активного сопротивления цепи ротора.
Для расширения диапазона регулирования и повышения жесткости характеристик применяется отрицательная обратная
связь по скорости вращения. Эта связь осуществляется, например, посредством тахогенератора ТГ, механически связанного с валом двигателя (см. рис. 4.7). Напряжение f/r тахогенератора включается встречно напряжению, снимаемому с потенциометра f/], и при Li gt; /t к промежуточному усилителю У -ПОДВОДИТСЯ разность напряжений:
U2=Ui-U.,= Ui-kjiu. (4.8)
К обмотке управления ОУ2 силового усилителя подводится напряжение
Ug = iU,~kTw)ky. (4.9)
Откуда
Здесь Лт - передаточный коэффициент тахогенератора;
ky - коэффициент усиления вспомогательного усилителя. Если коэффициент усиления вспомогательного усилителя достаточно велик, то второй член равенства (4.10) весьма мал по сравнению с первым. В этом случае установившаяся скорость вращения главным образом зависит от U\, снимаемого с потенциометра. Изменением этого напряжения регулируется скорость вращения в широких пределах. На рис. 4.7, б изображены механические характеристики двигателя, регулируемого усилителем с обратной связью; кривая / - характеристика двигателя без усилителя, кривая 2 - с усилителем при максимальной величине тока подмагничивания, кривая 3 - с усилителем при нулевом токе подмагничивания, кривые 4, 5 и 6 соответствуют различным напряжениям Ui (током подмагничивания) системы с обратной связью. Эти характеристики получаются жесткими вследствие действия обратной отрицательной связи. Если произойдет изменение скорости двигателя, то напряжение тахогенератора и ток подмагничивания автоматически изменяются в направлении, вызывающем стабилизацию скорости вращения. К. п. д. двигателя, регулируемого изменением скольжения, почти пропорционален скорости вращения ротора:
= = -А- (4.11)
где Дт] - поправка, зависящая в основном от потерь в статоре и механических. Потери в цепи ротора ДР32 = sP, а следовательно, и его одинаковый нагрев возможны при изменении момента по гиперболической зависимости
УИ= = -, (4.12)
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 [ 49 ] 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




