 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 [ 53 ] 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
Ръ = Е1я с моментом, обратно пропорциональным скорости вращения Л1= - (рис. 4.13,6). Скоростная характеристика в этом случае
Ег /я/я
= laquo;0 -
а уравнение механической характеристики
П = Пп -
(4.27)
(4.28)
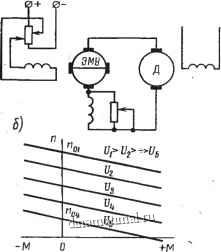
Здесь Е - э. д. с. генератора; Гд -сопротивление цепей якоря генератора и и двигателя. Механические характеристики при разных значениях э. .д. с. генератора (тока возбуждения) - прямые линии (рис. 4, 14 б) с жесткостью
ко меньшей, чем в случае постоянного напряжения, приложенного к двигателю ввиду того, что г = / я. д + / я. г. в качестве генераторов систем Г - Д небольшой мощности широко применяются электромашинные усилители (ЭМУ) с поперечным полем (рис. 4.14, а).
Преимущество данной системы состоит в ее быстродействии и в малой мощности управления вследствие высокого коэффициента усиления ЭМУ. Скорость вращения двигателя при увеличении нагрузки значительно снижается вследствие повышенного падения напряжения в цепи якорей. Жесткость характеристик двигателя может быть повышена компенсацией этого падения напряжения посредством обратных связей. Система Г-Д без обратных связей позволяет регулировать скорость вращения двигателя (изменением напряжения и потока) примерно в пределах до 20: 1. Ограничение пределов регулирования обусловлено двумя факторами: а) значительной величиной падения напряжения в щеточных контактах и обмотках якорей 00 сравнению с э. д. с. генератора при малых его токах возбуждения; б) наличием остаточной магнитной индукции в ЭМУ.
Рис. 4.14. Система Г-Д с ЭМУ в качестве генератора:
а) схема; 6) характеристика
Ослабление влияния этих факторов и расширение пределов регулирования достигается введением соответствующих обратных связей. В более мощных установках применяется так называемая квадратичная система возбуждения, в которой ЭМУ является возбудителем, питающим обмотку возбуждения генератора. Перенос регулировочного реостата из цепи возбуждения генератора в цепь возбуждения возбудителя весьма облегчает управление мощным приводом. Этот перенос благоприятно сказывается также и на величине снижения скорости вращения; жесткость характеристик получается большей, а диапазон регулирования возрастает примерно до 30 : 1. К. п. д. системы с квадратичным возбуждением несколько меньше, чем в обычной системе за счет добавления второго преобразовательного агрегата.
Большее расширение пределов регулирования в рассматриваемом приводе достигается на практике посредством применения отрицательной обратной связи. Как уже отмечалось, приводы по схеме Г-Д отличаются широкими возможностями автоматизации, процессами управления и регулирования. Широкий диапазон регулирования скорости (до 2000: 1), плавность регулирования, жесткость механических характеристик, малая мощность управления составляют достоинства автоматизированной системы Г-Д с обратными связями. Преимущества системы Г-Д получаются однако за счет увеличения установленной мощности (в три раза), снижения к. п. д. установки вследствие трехкратного основного преобразования энергии, а следовательно, большого увеличения затрат на оборудование и эксплуатацию установки.
sect; 4. 10. Регулирование скорости вращения приводов постоянного тока ионными управляемыми вентилями
Наряду с системами Г-Д постоянного тока в настоящее время используются регулируемые приводы с ..управляемыми ионными вентилями.
В приводах сравнительно небольшой мощности (до 10 кет) обычно используются тиратроны с управляемой сеткой, а в приводах большой мощности - управляемые ртутные выпрямители (УРВ).
В ионном управляемом выпрямителе величина выпрямленного тока (напряжения) регулируется изменением длительности времени его протекания за полупериод положительной полуволны анодного напряжения или иначе - изменением интервала
П 386 161
проводимости за полупернод. Начало проводимости цепи анода наступает при превышении напряжения на сетке критической величины. Возникший в цепи якоря ток уже нельзя устранить воздействием на сеточное напряжение; ток можно прекратить
лишь снижением анодного напряжения.
Управление длительностью интервала проводимости цепи анода за полупериод осуществляется изменением фазы сеточного напряжения относительно анодного напряжения (угла а).
Принцип управления ионного выпрямителя изменением фазы напряжения на сетке иллюстрируется рис. 4.15. На практике изменение фазы сеточного напряжения достигается посредством электромагнитных или электронных фазосмещающих устройств. На рис. 4.16, G приведена принципиальная схема ионного электропривода, содержащая анодный трансформатор Т,
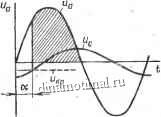
Рис. 4.15. Принцип фазового управления ионного выпрямителя
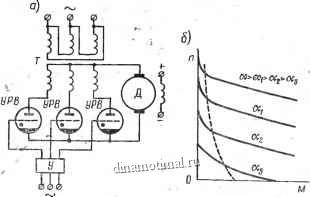
, Рис. 4.16. Ионный электропривод:
.а) схема; б) механические .характеристики
три УРВ, катодный реактор Р и двигатель Д с независимым возбуждением. Устройство для регулирования по фазе напряжения, подаваемого на сетки, обозначено через У. Соответствующие кривые напряжений УРВ изображены на рис. 4.17. Здесь вводятся обозначения: - среднее значение выпрямленного напряжения; U2--вторичное напряжение анодного трансформатора; а - угол регулирования, показывающий запаздывание
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 [ 53 ] 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




