 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 [ 54 ] 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
момента зажигания относительно момента перехода дуги с анода на анод в неуправляемом выпрямителе; во-выпрямленное значение напряжения неуправляемого выпрямителя.
Выпрямленное напряже-
= V2U2 ~ sin cos я =
= 00 COS о..
(4.29)
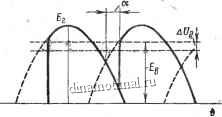
Рис. 4.17. Кривые напряжения З-фаз-ного управляемого ионного выпрямителя
Выпрямленное напряжение, а следовательно, и скорость двигателя изменяются в широких пределах регулированием величины угла а. Напряжение на зажимах двигателя меньше напряжения Е на величину падений напряжения в сопротивлениях: вторичной обмотки трансформатора Vz, катодного реактора г, сопротивления, обусловленного перекрытием анодов в процессе
ИХ одновременного горения , а также падения напряжения
в дуге ДС/д. Скоростная (4.30) и механичесйая (4.31) характеристики ионного привода выразятся уравнениями:
cos а-/я [-2 + Г2 + Гр + Г ) - А[/д
Ево cosa - Д[/
+ 2 + Р + )
(4.30) (4.31)
По (4.31) могут быть рассчитаны механические характеристики двигателя, показанные на рис. 4.16,6. Эти характеристики имеют меньшую жесткость по сравнению с системой Г-Д, вследствие повышенного падения напряжения в контуре. В об-ласти малых нагрузок скорость вращения значительно повышается вследствие прерывистого изменения тока в цепи якоря. Система ионного электропривода с одним комплектом УРВ (см. рис. 4.16) не может перейти в генераторный режим (без переключения цепи якоря на другую полярность). Объясняется это тем, что ионный преобразователь имеет одностороннюю проводимость; если э. д. с. якоря превзойдет по величине выпрямленное напряжение, то разность. U-Е изменяет знак на обратный, соответствующий нулевой проводимости цепи. Обеспечение возможности рекуперативного торможения и реверсирования привода достигается переводом ионного преобразователя в инверторный режим посредством применения более сложных схем с двумя
комплектами УРВ. Характерная отрицательная особенность ионных преобразователей состоит в том, что их коэффициент мощности уменьшается при снижении вБшрямленного напряжения и скорости вращения двигателя. При малой скорости коэффициент мощности оказывается низким. Это вытекает из самого принципа регулирования скорости, основанного на изменении сдвига фазы сеточного напряжения, а следовательно, и фазы тока в цепи анода относительно анодного напряжения.
Электроприводы с управляемыми ионными выпрямителями находят применение в ряде промышленных установок благодаря их сравнительно высоким показателям в отношении затрат на оборудование, коэффициента полезного действия при повышенных напряжениях и эксплуатационных расходов, быстроты протекания переходных процессов. По этим показателям системы УРВ-Д превосходят системы Г-Д. Вместе с этим системы с управляемыми ионными выпрямителями характеризуются и некоторыми отрицательными свойствами: малым коэффициентом мощности при глубоком регулировании скорости; сложностью рекуперативного торможения и реверсирования, требующих двойного числа выпрямителей и затрат на них, возрастанием потерь в двигателе из-за пульсаций тока, вызывающих увеличение габарита двигателей для заданной мощности на валу.
sect; 4. 11. Регулирование скорости электропривода постоянного тока полупроводниковыми управляемыми вентйляши-тиристорами
В этом приводе скорость вращения регулируется изменением напряжения подводимого к якорю двигателя от полупроводникового управляемого вентиля-тиристора. Отличаясь высокими возможностями, такие приводы в настоящее время интенсивно развиваются и являются весьма перспективными.
В зависимости от типа тиристорного преобразователя различают: одно- и трехфазные, одно- и двухполупериодные схемы. Системы подразделяются также на нереверсивные и реверсивные. Простые однофазные схемы используются в установках малой мощности, а трехфазные -в установках сравнительно большей мощности.
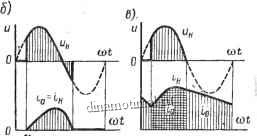
Однополупериодная схема с одним тиристором Т, обратным дрюдом До и нагрузкой г , L изображена на рис. 4.18, а. Тиристор открывается в момент а, когда подается сигнал на его управляющий электрод в положительном полупериоде подво-
дпмого напряжения и запирается в момент (3 при токе отключения в отрицательном полупериоде напряжения (рис. 4.18,6).
Указанные величины получили название: а - угол включения или отпирания, (3 - угол запирания, а разность -а - интервал проводимости. Среднее зна(чение напряжения в цепи нагрузки регулируется изменением угла отпирания а, от которого зависит величина интервала проводимости К. Предельное отклонение угла отпирания а-т, отвечающее максимальному изменению среднего напряжения, называется диапазоном управления.
13 2%
Рис. 4.18. Система с тиристором;
а) одиополупериойная схема; временные диаграммы при отсутствии обратного диода (б) и при наличии диода (в)
Для интервала проводимости идеализированного тиристора при отсутствии обратного диода имеем:
(4.32)
Интегрирование и подстановка начальных условий = О, = О, (nt = а, дает:
г = cos9
iuf-a
Sin (mt - 9) - Sin (a - ср) e
Здесь
Среднее значение напряжения в цепи нагрузки
{wt) = (cos а - cos .8).
(4.33)
(4.34)
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 [ 54 ] 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




