 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 [ 6 ] 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
sect; 1. 3. Оптимальное передаточное число редуктора
Величина передаточного числа редуктора оказывает определенное влияние на ускорение и связанное с ним время протекания переходных механических процессов, а также на потребное значение момента двигателя. Уравнение движения привода, приведенное к валу рабочей машины,
. (j + cj,k)=m-. (1.16)
Здесь момент инерции редуктора учитывается коэффициентом с. Из условия максимального ускорения
оптимальная величина передаточного числа
Если необходимо обеспечить минимальное время протекания переходных процессов, например, при частых разгонах и торможениях специального следящего привода, то при отсутствии других требований значение передаточного числа выбирается .-близким опт- Определение оптимального переда!очного числа можно связать с решением другой задачи - расчетом мини- мального значения момента двигателя.
Уравнение движения, приведенное к валу двигателя, для случая максимального ускорения механизма
. = (1.19)
Из выражения ---О следует, что оптимальное передаточ-
ное число
7ми gt;мт + Лы
kou.=-- . (1.20)
Здесь /д пока неизвестно. Если принимается, что максимальная скорость механизма ш, при номинальной скорости двигателя должна быть ш , то
оп.-. (1.21)
Приравнивая (1.20) и (1.21), получим
7Х = -А--. (1.22)
Подстановка Аопт из (1.21) и /д из (1.22) в (1.19) дает соотношение, определяющее минимальную потребную величину момента двигателя
УИ = 2(- + /Я..)-. (1-23)
Соответствующая минимальная мощность двигателя
Р laquo;н = 2(м- + Ja, ) (1.24)
Порядок расчета оп*: вначале определяется Рнн по (1.24) и 7дШ из (1.22, затем по каталогу выбирается двигатель н@-минальной мощности Рн gt; Рмин со значением /дШ deg;, близким найденному. Оптимальное передаточное число выбирается по (1.21).
Глава П ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА ЭЛЕКТРИЧЕСКИХ МАШИН
sect; 2. 1. Основные понятия
Главные свойства электропривода определяются основными характеристиками электродвигателя: а) зависимостью скорости вращения двигателя от момента - механической характеристикой; б) зависимостью скорости двигателя от тока - скоростной характеристикой; в) зависимостью вращающего момента от тока - момеитиой характеристикой; г) зависимостью скорости двигателя от регулирующей величины (напряжения, частоты и т. д.) - регулировочной характеристикой.
По условиям питания и схемам соединения характеристики двигателей подразделяются на две группы:
1 естественные характеристики, отвечающие номинальной величине и частоте напряжения на зажимах при отсутствии добавочных сопротивлений в обмотках;
2) искусственные характеристики, соответствующие неноминальной величине и частоте приложенного к зажимам напряжения, при наличии добавочных сопротивлений в цепях обмоток двигателя.
Важным показателем, относящимся к ме-- ханической характери- стике, является ее же-сткость. Жесткость выражается отношением приращения момента к приращению скорости или производной . момента по скорости (рис. 2. 1)
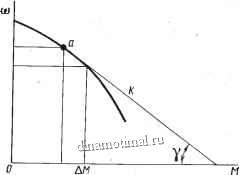
Рис. 2.1. к определению жесткости механической характеристики:
К - касательная к точке а
| 1 2 3 4 5 [ 6 ] 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




