 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 [ 60 ] 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
ский интерес представляют также изменения во времени и максимальные значения вращающего момента, тока и мощности нагрев отдельных частей и двигателя в целом. Все эти электрические и механические показатели взаимно связаны между собой и определяют производительность, надежность и экономичность электропривода в эксплуатации. Знание характера изменения электрических и механических показателей системы позволяет правильно выбрать мощность электродвигателя, способ и средства управления им, а также произвести расчет отдельных звеньев системы.
Возникновение переходных процессов и закономерность их протекания в электроприводе связаны с изменением электромагнитной энергии в электрических цепях и механической энергии движущихся масс в период перехода от одного установившегося режима к другому. В переходный период в электроприводе происходит накапливание или рассеяние энергии. Наличие энергии указывает на то, что переходный процесс в электромеханических системах не может протекать мгновенно. В неустановившихся режимах происходят изменения электрических, магнитных, механических и тепловых величин, зависящие от ряда факторов.
На протекание переходных процессов в электроприводах оказывают влияние различные виды инерции: электромагнитная механическая и тепловая, которые в конечном счете оказывают на процессы замедляющее действие.
Степень влияния каждого вида инерции характеризуется так называемыми инерционными постоянными времени: электроме- ханической Г , электромагнитной и тепловой Гт.
Реальный йереходной процесс электропривода является сложным единым комплексом, состоящим из электромагнитного, механического и теплового процессов. Однако при анализе-основных переходных режимов, как правило, учитываются лишь механическая и электромагнитная инерция. Сравнительно медленное изменение температуры в течение переходного режима-не учитывается. Более того, в большинстве случаев ограничиваются учетом только механической инерции, имея в виду, что анализ переходного процесса не требует большой точности. Поэтому- представляется возможным во многих случаях приближенно; анализировать механические переходные процессы без учета электромагнитных.
Переходные процессы, учитывающие только механическую инерцию, называются механическими.
Для более точного анализа переходных процессов нередко необходимо учиты-бать, помимо механической, и электромагнитную инерцию. Переходные процессы электроприводов, в которых учитывается механическая и электромагнитная инерция, называю1;ся электромеханическими.
Анализ электромеханических переходных процессов представляет собой весьма сложную задачу, в особенности в системах автоматизированного электропривода, где приходится дополнительно учитывать характеристики аппаратуры управления.
sect; 5. 2. Приближенный аналитический расчет переходных процессов
Определение времени разгона и торможения электропривода.
Время разгона и торможения электропривода оказывает влияние на режим работы и производительность исполнительного механизма. Время пуска и торможения можно определить путем решения уравнения движения электропривода.
Разделение переменных уравнений движения (1.5) и интегрирование дают:
laquo;2
~~ } 38,2 М - Мс
(5.1)
Решение уравнения (5.1) возможно в том случае, если известна зависимость вращающего момента электродвигателя и момента статического сопротивления от скорости. Если моменты двигателя и сопротивления находятся в сложной зависимости от скорости, то уравнение движения аналитически не решается. В этом случае пользуются графо-аналитическим или гр.афическим методами. При условии постоянства (М-М с) и GZ)2 время переходного режима
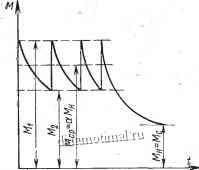
Рис. 5.1. Диаграмма изменения момента двигателя от времени при реостатном пуске
GD (Иа - /г,) 38,2 (М -Мс)
(5.2)
Время разгона двигателя от laquo;1 = О до laquo;2 = laquo;н под действием среднего момента Мср = аМ (рис. 5.1)
38,2 (аМ - Мс)
(5.3)
Коэффициент а = 1,2 2,0. Время торможения
laquo;1
~ J 38,2
(5.4)
laquo;а
в частном случае, когда-Ж, и GD неизменны, время торможения
Зависимость скорости и момента от времени. Если динамический момент выражается как функция скорости, то в ряде случаев можно приближенно рассчитать переходный процесс аналитически Наиболее простое решение задачи получается, когда механические характеристики двигателя и механизма являются линейными, в частности при Mc=const. На рис. 5.2 приведен график скорости в функции динамического момента. Эту зависимость можно выразить следующим образом:
М = k (о)о - Дш - ш). (5.6)
Здесь k - коэффициент про-порциональ ности, определяемый по начальным условиям;
До)с = Щ - Шу; шо - скорость идеального холостого хода; О) - текущая скорость двигателя. В случае AJ == О и До) = О
.Ж, = ( laquo;)о со). (5.7)
В начальный момент пуска ш = О и М = Жд, поэтому уравнение (5.6) приводится к форме
Рис. 5.2. Механическая характеристика двигателя и механизма при Мо=const
откуда
Подставляя полученные значения для k в (5.7), получим:
-(ш-ш) и Мд = - (Шу-Ш).
Исходя из равенства Mj = J и разделяя его переменные
dt = J определим время, в течение которого скорость электропривода достигает некоторого значения ш:
(5.8)
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 [ 60 ] 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




