 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 [ 61 ] 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
где %ач - скорость в начале переходного процесса. Используя выражения (5.8) и (5.7), получим:
гт-? = П
(5.9)
где Гм = --электромеханическая постоянная времени.
Из последнего выражения, после некоторых преобразований, нахрдим зависимость с)=ф():
ш = соу (1 - е- м) - е-/м. (5.10)
В случае, когда разгон происходит при условии Шнач =0, уравнение (5.10) примет упрощенный вид:
ш = ш (1 е-м).
(5.11)
На рис. 5.3 приведены кривые зависимости с)=ф(), построенные на основании (5.10) и (5.11). Кривая / характеризует
процесс разгона, когда laquo;начО; а Мс = 0; кривая же 2 относит-
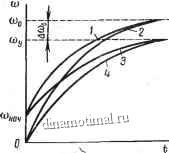
ся к процессу при и Мс = 0. Кривая 3 соответствует о) ач =0 и Мс = 0, а кривая 4 описывает процесс при
= 0 и Же 0.
Рис. 5.3. Кривые ш=ф(0
Характеристики w = ф () показывают, что практически процесс разгона завершается в течение гр = (4 - 5) Гм.
Электромеханическая постоянная времени Т, характеризующая быстроту протекания механических переходных процессов:
Здесь Мп - пусковой (максимальный) вращающий момент.
Физически электромеханическая постоянная времени представляет собой время, в течение которого электропривод под .действием постоянного момента, равного пусковому, разгонится до синхронной скорости Шо- . -
Помимо характера изменения скорости, часто требуется знать закон изменения момента двигателя в функции времени M=f{t). Он может быть найден подстановкой в (5.10) значений со.
laquo;Онач И о)у, выраженных через соответствующие вращающие моменты: М, Мнач, у-,
laquo;Онач = lt; raquo;0 - ЛГнач,
После подстановки получим:
/И = Жу (1-е-м)--,Л[,
(5.12)
sect; 5. 3. Графоаналитическое решение уравнения движения электропривода
Для многих приводов уравнение движения оказывается нелинейным и не поддается аналитическому решению. В таких случаях можно использовать графо-аналитические способы. Наиболее распространенными являются методы площадей и конечных приращений.
Метод площадей. Зависимости скорости и момента от времени графо-аналитически находятся по уравнению движения в конечных приращениях
. (5.13)
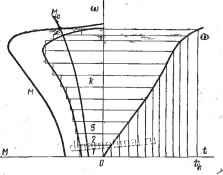
Механические характеристики двигателя и рабочей машины изображаются во втором квадранте (рис. 5.4). По ним строится кривая динамического момента. В режиме пуска, например, Жд = Ж - Me = ( laquo;)). Эта кривая разделяется на т участков. Чем больше т, тем точнее результаты решения.
Динамический момент на каждом участке принимается равным среднему постоянному значению. Для любого, например, fe-ro участка
- (5.14)
Рис. 5.4. Построение кривой lt;й = ф( lt;) для случая пуска электропривода методом площадей
Этому значению времени, откладываемому по осп абсцисс в первом квадранте, соответствует ордината Ofe-i+Acoft.
Производя подобное построение для всех участков, получают кривую со-ф(). Время пуска
як
(5.15)
Таким образом можно построить кривую сй=ф(?) не только для пуска, но и для другого переходного режима, например торможения.. При этом динамический момент в общем случае, равный Л1д = plusmn;М+Мс, необходимо найти с учетом знаков составляющих моментов.
Метод конечных приращений. Так же, как и раньще, строят кривую динамического момента по характеристикам двигателя и механизма с учетом знаков их моментов.
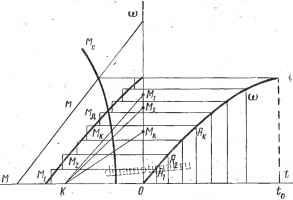
Рис. 5.5. Построение кривой ю=ф( lt;) для случая пуска электропривода при использовании метода конеч-. ных приращений
Врежиме разгона привода Жд = 7W - Же (рис. 5.5). Исходным уравнением движения в конечных приращениях является (5.13). Кривая со = (р (Жд) разделяется на интервалы, на каждом ;из которых момент принимается неизменным, равным среднему значению. Величины динамических моментов откладывают по оси ординат: для Ж, Жг,..., Ж и т. д. Затем проводятся прямые кМ, ЛЖг,..., КМ и т. п. Точка К удалена от начала координат О на расстояние ОЯ, равное в определенном масштабе моменту инерции. Далее, в первом квадранте проводят прямые OAi\ AAz и т. д., параллельные соответственно JKM-i, КМ и т. п. Таким способом получается кривая ш=!р (t).
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 [ 61 ] 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




