 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 [ 75 ] 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
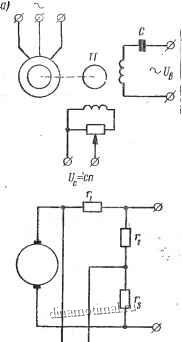
тока, изображены на рис. 6.14. Приведенные мостиковые схемы дают возможность косвенно и лишь ориентировочно измерять скорость вращения двигателей. В настоящее время для устройства обратной связи по току и скорости двигателя все шире применяются измерительные магнитные усилители с напряже-. нием, пропорциональным указанным величинам.
0 0
и-СП
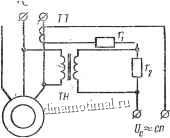
Рис. 6.14. Обратные связи по скорости, осуществляемые посредством;
а) тахогенератора; б) мостииовой электричеокой цепи в двигателе переменного тока; в) мостиковой цепи в двлгателе постояиного тока
Система автоматизированного электропривода с обратными связями в общем случае состоит из следующих звеньев (рис. 6.15): электродвигателя Д, преобразователя Я, цепей управления-задающего и сравнивающего устройства ЗС, измерительного устройства обратной связи И и цепей корректирующих обратных связей К.
Цепи управления содержат ряд устройств: задающие для получения например, требуемой скорости вращения; измерительные, включенные в цепи обратной связи, и информирую-
щие о работе двигателя и рабочей машины (РМ), а также сравнивающие.
Отдельные звенья системы отличаются разнообразием типов. Например, преобразователем может быть электромашинный, магнитный, тиратронный или полупроводниковый усилитель, статический или электромашинный преобразователь частоты и т. д.
Задающими устройствами обычно служат потенциометры, поворотные трансформаторы, сельсины-датчики и др.
Рис. 6.15. Структурная схема типового электропривода
Корректирующие цепи включают в себя те или иные элементы внутренней обратной связи, улучшающие качество переходных процессов. Ими могут быть . электромашины, пассивные четырехполюсники и др.
В настоящее время в автоматизированных приводах все шире применяется программное регулирование, осуществляемое на основе определенной информации или программы.
В специальных приводах развиваются также самонастраивающиеся системы управления, действующие в зависимости от отклонения регулируемых величин от их экстремальных значений.
Рассмотрим примеры замкнутых систем регулируемых электроприводов постоянного и переменного тока.
sect; 6. 6. Электропривод постоянного тока
с магнитным усилителем в цепи якоря и обратными связши
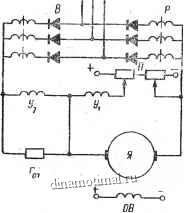
jDcHOBHbiMH частями привода являются: двигатель, магнитный усилитель с выпрямителями и задатчик. К якорю двигателя подводится выпрямленное напряжение рабочих обмоток Р
усилителя, питаемых от сети переменного тока через полупроводниковые диоды В. Напряжение якоря двигателя устанавливается задатчиком 3 или потенциометром П (рис. 6.16). .Скорость двигателя регулируется изменением выпрямленного напряжения, подводимого К- якорю посредством магнитного уси-лнтеля. Индуктивность рабочих обмоток Р усилителя, падение напряжения в них, напряжение и скорость якоря зависят от результирующей н. с. обмоток управления У. Она равна алгебраической сумме н. с. обмоток управления Ух и У2- Ток в обмотке Ух определяется разностью напряжений задатчика и якоря Uxy= U-i-f/я- Вторая обмотка управления усилителя включена на напряжение, пропорциональное току якоря двигателя.
-чэ / 0-
Рис. 6.16. Схемы электропривода постоянного тока с магнитным . усилителем:
а) принципиальная; б) структурная; в) однофазная схема замещеиия преобразователя
Схема управления - замкнутая, содержит отрицательную обратную связь по напряжению н положительную токовую. Наличие этих связей обеспечивает значительный диапазон регулирования скорости и умеренную жесткость механических характеристик на каждой ступени, задаваемой потенциометром. Здесь электрическим силовым преобразователем служат выпрямители и усилители, включенные по трехфазной мостиковой схеме. Основываясь на обычных допущениях, принимаемых в инженерных расчетах (линейность усилителя, выпрямителя и др.), рассмотрим некоторые соотношения и характеристики данного
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 [ 75 ] 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




