 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Электроприводы
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 [ 84 ] 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
откуда
= Т- (6.76)
Третье уравнение приобретает вид
Ж = -- (6.77)
Его решение для постоянного момента сопротивления, не зависящего от скорости,
Х = Л-ХоТ. (6.78)
Приравнивая (6.76) и (6.78), получаем:
laquo;2 = -j-j- [1 plusmn; Vl~{K--Af]. (6.79)
Это равенство выражает оптимальную зависимость частоты ротора от времени для случая постоянного момента сопротивления. Если момент сопротивления линейно зависит от скорости, решением уравнения (6.77) будет:
X = - Ле (6.80)
Решая (6.80) совместно с (6.76), получим оптимальную функцию частоты ротора от времени
2о., Хо д,. . (6.81)
1 - laquo;1 ~ k
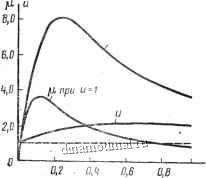
Итак, условием оптимального управления асин.хронным двигателем является поддержание магнитного потока постоянным и изменение частоты тока ротора согласно уравнению (6.79) и (6.81). Это условие может быть выполнено надлежащим регу--лированием амплитуды напряжения статора в процессе изменения его частоты. В случае постоянной частоты статора и переменной нагрузки величину его напряжения следует изменять, чтобы основной магнитный поток сохранить неизменным в условиях изменяющегося падения напряжения в статоре. В случае неизменного напряжения поток снижается с увеличением нагрузки и перегрузочная способность двигателя будет меньше, чем при Ф-const. Примерная зависимость вращающего момента от скольжения для двух случаев - постоянного значения потока (6.59) и неизменного напряжения - изображены на рис. 6.25. Здесь же показано изменение напряжения, обеспечивающее постоянство магнитного потока. Кратность максимального момента в режиме постоянного потока больше, чем при постоянном напряженпп в 1,5-ь2,5 раза, достигая величины порядка 3-7,5 для двигателей с различными номинальными данными. По этой
причине частота в роторе-при номинальном моменте имеет величину порядка 0,2 ч-0,3 (критическая частота равна единице). Для сравнительно небольших значений частоты ротора соотношение (6.79), в котором пренебрегают величиной copy;iO, принимает вид
jU. при Ф = }
; 2(U2 =
= А- (6.82)
Вращающий момент
2 lt;02Ф2
2щ =
1,0 S
Рис. 6.25. Зависимости вращающего момента от скольжения при: постоянном напряжении (U-1), постоянном потоке (Ф=1). Изменение напряжения, обеспечивающее постоян-ство магнитного потока
= А- v- (6.83)
Следовательно в режиме оптимального управления частота тока ротора и вращающий момент изменяются во времени примерно по линейному закону.
Скорость вращения (6.35):
V = J (р - rf. = (Л - Рс) - 0,5. (6.84)
Для граничных условий vi=V2=0 имеем: (Л-ю Т-0,51оТ = 0,
откуда
А =1о -2 + = Н + V-C,
где Ро = 0,5/.о7-начальный момент.
Таким образом, получаем приближенные формулы, описывающие оптимальное частотно-амплитудное управление асинхронной машины в переходных режимах:
Ро -т Рс
рРо + Рс--Y
(6.85) (6.86)
(6.87)
. (6.88) (6.89)
Скорость вращения и частота напряжения статора, которой она почти пропорциональна, изменяются во времени по параболической кривой. На рис. 6.26 приведены кри- f вые частоты тока ротора, ! вращающего момента, скорости ротора и частоты напряжения статора в оптимальном режиме для случаев нулевых граничных скоростей
= Vo = О, =
= 0,25 и fic = 0.
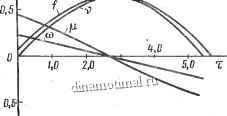
Рис. 6.26. Изменение частоты статора (/), частоты ротора (со), момента ((г) и скорости вращения (v) в функции времени при оптимальном частотном управлении
Эти кривые рассчитаны по уточненным формулам. Они подтверждают отмеченную выше приближенную закономерность изменения переменных. Частотное управление, близкое к оптимальному, отличается высокими энергетическими и механическими показателями. Оно сильно увеличивает производительность механизма при допустимом нагреве или снижает потери энергии при заданной производительности.
sect; 6. 14. Оптимальное амплитудное управление асинхронным двигателем
Сравнительно простым способом управления асинхронным двигателем с короткозамкнутым ротором является изменение только амплитуды (или действующего значения) подводимого напряиения к статору, частота которого сохраняется постоянной. Напряжение можно изменять посредством дросселя насыщения, автотрансформатора, реостата или другого устройства. Для краткости отнесем их к амплитудному управлению, поскольку все они в конечном счете воздействуют, хотя и различными средствами, на одну и ту же величину - напряжение на зажимах статора. Оптимальная закономерность амплитудного управления в отношении магнитного потока подобна рассмотренной
T J,
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 [ 84 ] 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |




