 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
Глава III
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ
1. ПОНЯТИЕ О ПЕРЕХОДНОЙ ФУНКЦИИ
И ЧАСТОТНЫХ ХАРАКТЕРИСТИКАХ ЭЛЕМЕНТОВ
Рассмотренные выше статические характеристики позволяют судить только об установившихся режимах элементов. Однако, как известно, элементы автоматики практически все время работают в переходных режимах, и поэтому необходимо знать их динамические свойства.
Связь между входной и выходной величинами в переходном режиме устанавливается дифференциальными уравнениями, которые составляются на основании законов физики. Дифференциальные уравнения часто (а при строгом рассмотрении процессов всегда) оказываются нелинейными. Однако во многих случаях, подобно статическим характеристикам, эти уравнения элементов удается линеаризировать, т. е. свести нелинейные дифференциальные уравнения к линейным дифференциальным уравнениям, приближенно отображающим переходный процесс для сравнительно небольших отклонений входной величины. При этом оказывается, что, несмотря на огромное конструктивное разнообразие линеаризируемых элементов, процессы во многих из них при определенных допущениях описываются одинаковыми линейными дифференциальными уравнениями.
Динамические свойства элементов можно наглядно проследить по графикам переходного процесса, возникающего при скачкообразном изменении входной величины и нулевых начальных условиях. Для линейного элемента общий характер переходного процесса не зависит от величины скачка на входе, если эта величина не нарушает линейного характера самого элемента. Поэтому для удобства сопоставления динамических свойств различных элементов любое скачкообразное изменение входной величины принимают за условную единицу. Если при этом началь-
условия нулевые, то соответствующее воздействие на входе называют единичным (или единичной функцией) (рис. 20, а).
Простейшим примером единичного воздействия является подключение к источнику постоянного тока пассивной электрической цепи (скачкообразное изменение) при отсутствии напряжений на емкостях и токов в индуктивностях (нулевые начальные условия). Функция, определяющая изменение выходной величины во времени при единичном воздействии на входе, называется переходной функцией (рис. 20, б).
Следовательно, для получения переходной функции необходимо решить дифференциальное уравнение (классическим или
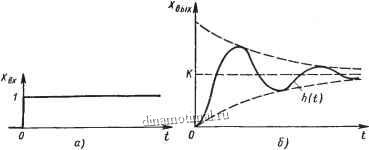
Рис. 20. К определению динамических характеристик: о - график единичного воздействия иа входе; б - график переходной функции
операторным методом), положив начальные условия нулевыми и приняв скачкообразное изменение входной величины равным единице.
При исследовании систем автоматического регулирования в целом описание динамических свойств отдельных элементов целесообразно осуществлять, используя понятия передаточной функции и частотных характеристик элементов. Эти понятия тесно связаны с дифференциальными уравнениями.
Если известно дифференциальное уравнение для переходного процесса элемента, то без труда можно определить его передаточную функцию, которая в той же степени характеризует его динамические свойства, что и уравнение. Передаточной функцией W (р) называется отношение операторного изображения выходной величины к операторному изображению входной величины (при нулевых начальных условиях).
Если, например, дифференциальное уравнение имеет вид
пЛвык -j-
+ иуХвых + иоХвых =
hXgx + biXex + + biXli + + bnX,
ex raquo;
то, переходя к операторной форме записи при нулевых начальных условиях, получим
(а р Н----+ aiP Н----JaxPao) Хеых (р) =
= {ЬпР + + + ... + 6.Р + Ь ) ip)-
Отсюда согласно определению передаточная функция будет иметь следующий вид:
Xsx(p) - а р laquo;+-+а,р+---+а,р + а Р (р) где
Я (р) == а р Н----+ Н----+ laquo;iP +
Q (Р) = Ь р Н----+ + + 6iP + Ьо.
и свойства элемента будут оцениваться по значениям коэффициентов а,- и bi.
При р = О передаточная функция превращается в передаточный коэффициент (коэффициент усиления)
К = W(0) =
В дальнейшем передаточные функции будут использованы при представлении элементов звеньями, при соединении звеньев между собой, а также для определения частотных характеристик элементов.
При оценке динамических свойств элементов с помощью частотных характеристик в качестве возмущающего входного воздействия используется гармоническая (синусоидальная) функция времени.
Эта функция берется в вещественной или в комплексной форме
Хвх (t) = exnfi gt;
где ш - круговая частота колебаний.
Если входная величина линейного звена меняется по гармоническому закону, то в принужденном режиме (после затухания свободных составляющих переходного процесса) устанавливается определенное соотношение между выходными и входными колебаниями. Для линейного элемента выходные колебания будут также гармоническими:
причем указанное соотношение не зависит от величины входных воздействий и будет определяться только частотой колебаний.
| 1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




