 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
часть вторая
НАИБОЛЕЕ РАСПРОСТРАНЕННЫЕ ЭЛЕМЕНТЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
Глава IV
МЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
1. МЕХАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕЩЕНИЯ
К преобразователям перемещения следует отнести такие передаточные механизмы, как рычажная, зубчатая, червячная и фрикционная передачи, кулачковые механизмы и др., а также гидравлическая и пневматическая передачи.
Рычажная, зубчатая и червячная передачи очень часто входят в состав различных функциональных элементов. Самостоятельно они обычно выполняют роль преобразующих или исполнительных элементов. Как правило, для авиационных систем автоматического регулирования можно пренебречь наличием зазоров в кинематических парах, неравномерностью зацепления и другими небольшими по величине погрешностями. Поэтому три первых типа указанных передач (рычаги и редукторы) практически замещаются линейными звеньями. Кулачковые механизмы, очевидно, могут быть линеаризованы далеко не во всех случаях, так как их статические характеристики в принципе нелинейны.
Если инерционностью рассмотренных передаточных механизмов нельзя пренебречь, то ее влияние обычно удается учесть изменением параметров звена, замещающего элемент. Например, момент инерции редуктора приводится к валу двигателя и электромеханическая постоянная последнего (см. гл VII) соответственно увеличивается. Сам же редуктор рассматривают как пропорциональное звено.
Фрикционная, гидравлическая и пневматическая передачи обычно используются в качестве управляемых передач. К управляемым передачам относятся и зубчатые муфты сцепления. Элементы, у которых роль управляющего устройства выполняет муфта, являются активными, так как их конструктивные схемы имеют источник вспомогательной энергии (см. рис. 3, б, г). Такие элементы по существу являются механическими усилителями и используются обычно в качестве исполнительных элементов.
i / \ | |||||||
Рассмотрим в виде примера конструктивную схему привода с фрикционной нереверсивной муфтой (рис. 30). Ведущий вал 1 приводится в движение вспомогательным двигателем 2 (чаще всего электродвигателем) и вращается с постоянной скоростью со = = const. Ведомый вал 3 жестко связан с нагрузкой 4. Ведущий и ведомый валы соединены муфтой 5. Одна из частей муфты жестко закреплена на одном валу, другая часть (на рисунке правая) может перемещаться по шпонке
вдоль другого вала. ; -ifi- 3
Если включить муфту, т. е. ввести в непосредственное соприкосновение трущиеся по-
верх ности обеих половин муфты, u=const ----(ых
то при достаточной силе нажатия ведомый вал начнет вра- Рис. 30. Нереверсивная муфта: ЩаТЬСЯ с некоторой скоро- / ведущий вал: 2 - двигатель; 3 - ве-стью СОе, д.. Если для сцеплен- laquo; й вал; 4 - нагрузка; 5 - муфта
НЫХ зубчатых муфт сцепления
скорость сй ,. обязательно равна скорости ведущего вала, т. е. всегда имеет место релейный характер управления, то для фрикционных муфт (если момент нагрузки уменьшается с понижением скорости вращения) возможно и изменение скорости в соответствии с силой нажатия. В рассмотренной схеме управляющий (входной) сигнал, подаваемый на муфту 5, представляет собой величину перемещения подвижной части муфты (или величину силы, с которой подвижная часть муфты прижимается к неподвижной). Ведущий вал служит лишь для передачи энергии от источника вспомогательной энергии - неуправляемого двигателя 2.
Подобное устройство, как правило, оказывается более быстродействующим, чем возможная система с управляемым двигателем и жесткой связью двигателя с нагрузкой. Это объясняется тем, что в рассмотренной схеме ротор двигателя вращается все время и потому запаздывание, связанное с инерционностью двигателя, как бы исключается.
2. ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ УСИЛИТЕЛИ
Из большого числа разного рода гидравлических усилителей йаибольшее применение в автоматических устройствах находят поршневые гидравлические усилители с золотниковым управлением. Они являются усилителями мощности в форме механического движения и обычно используются в качестве исполнительных элементов - серводвигателей
Принципиальная схема поршневого гидроусилителя с золотниковым управлением показана на рис. 31. Вспомогательной Энергией здесь является энергия жидкости, нагнетаемой насосом /
и находящейся под давлением. Пределы изменения величины давления ограничиваются стабилизатором 2. В авиационных установках в качестве рабочей жидкости применяется масло или специальные жидкости с малым температурным коэффициентом вязкости.
Входной величиной усилителя служит перемещение штока золотника 5, выходной - перемещение штока поршня 4 силового цилиндра. Так как здесь в выходной цепи источник вспомогательной энергии двигатель насоса, то выходная мощность движения поршня может быть значительно больше мощности, затрачиваемой на перемещение золотника, т. е. можно получить усиление входного сигнала по мощности.
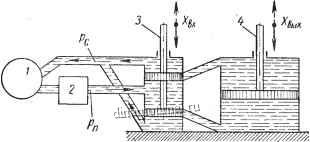
Рис. 31. Поршневой усилитель (астатический гидродвигатель) с золотниковым управлением:
/ - насос; 2 - стабилизатор давления; 3 - шток золотника; 4 - силовой поршень
Пусть в исходном состоянии каналы, соединяющиеся с силовым цилиндром, полностью перекрыты. Поршень 4 при этом, очевидно, неподвижен. При перемещении золотника вверх верхняя полость силового цилиндра оказывается сообщенной с находящимся под давлением маслом, а нижняя полость одновременно сообщается с обратным сливным трубопроводом. В результате этого давление в верхней полости рабочего цилиндра оказывается более высоким и поршень начинает перемещаться вниз. При этом масло вливается в верхнюю полость и выталкивается из нижней.
Скорость движения поршня определяется объемом втекающего в цилиндр и вытекающего из него за единицу времени масла. Этот объем зависит от размеров отверстий, получившихся в результате смещения золотника. Таким образом, установившаяся скорость движения выходного штока для случая постоянной нагрузки (постоянного по величине усилия, противодействующего движению поршня) определяется величиной перемещения входного штока. Заметим, что усилия, действующие на поршень, определяются разностью гидравлических давлений в полостях рабочего цилиндра и практически не зависят от скорости движения
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [ 16 ] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




