 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [ 23 ] 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
Таким образом, аналитическое выражение статической характеристики струйного гидроусилителя при сделанных допущениях будет иметь вид
Sign Хех. (60)
Величина Q находится по выражению (59), а зона нечувствительности зависит от величины нагрузки и определится соотношением
Q у Р яеР
IS * laquo; laquo; laquo; 2yQS Ширина зоны нечувствительности
2а = 2Х laquo; = -. (61)
Пренебрегая зоной нечувствительности, получим передаточный коэффициент гидроусилителя как интегрирующего звена
относящийся, конечно, только к линейной области характеристики, ограничиваемой в данном случае соотношением
\Хех\-.
Схему, изображенную на рис. 38, б, можно анализировать как интегрирующее звено с жесткой обратной связью при Кос = 1-
7. ОСОБЕННОСТИ РАСЧЕТА ПНЕВМАТИЧЕСКИХ УСИЛИТЕЛЕЙ
Расчет пневматических усилителей осложняется явлением сжимаемости газа и резким изменением характера истечения газа через золотниковые отверстия при переходе от докритического соотношения давлений в полостях, соединяемых золотниковым отверстием, к надкритическому. Перепады давления во входном и выходном золотниках даже при конструктивной идентичности последних .в пневматических усилителях не будут одинаковыми.
Специфические трудности расчета статических характеристик пневматических усилителей заключаются в том, что режимы истечения через золотниковые отверстия зависят от всей предыстории движения поршня, т. е. даже при одинаковом открытии золотника и положении поршня силового цилиндра характер истечения может быть различным. В некоторых случаях резкие изменения характера истечения и явления сжимаемости воздуха приводят к возникновению автоколебаний и установившийся режим, который можно было бы охарактеризовать статической характеристикой, вообще не наступает.
Поэтому расчеты приходится проводить, составляя уравнения для отдельных этапов движения (например, до и после наступления движения), причем и на этих этапах соответствующие дифференциальные уравнения могут быть нелинейными.
Отмеченные трудности приводят к тому, что обычно становятся на путь экспериментальной отработки усилителей и определения их параметров. Однако в настоящее время, учитывая распространение вычислительных машин, предварительное аналитическое исследование характера движения является, безусловно, целесообразным.
8. ПРЕОБРАЗОВАТЕЛИ СКОРОСТИ В ПЕРЕМЕЩЕНИЕ
Преобразователи скорости в перемещение в системах автоматического регулирования скорости вращения выполняют роль воспринимающих элементов. Во многих других случаях такие
преобразователи, которые по существу являются механическими дифференцирующими звеньями, используются в качестве корректирующих элементов.
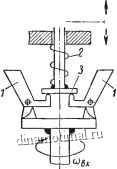
Хорошо известная схема центробежного воспринимающего элемента (центробежного тахометра) представлена на рис. 41. С увеличением скорости вращения вала oiex возрастает величина центробежной силы, и закрепленные на валу грузы / расходятся, поворачиваются на своих осях и, воздействуя на тарелку толкателя 5, перемещают последний вверх, сжимая при этом пружину 2. Для получения плавной зависимости между скоростью вращения вала и установившимся отклонением муфты Хеых необходимо правильно подобрать жесткость противодействующей пружины. В противном случае возможен релейный режим работы (см. гл. II, рис. 17 и 18 при Хс = ( gt;вх), который обычно является нежелательным.
Наличие существенных масс грузов и противодействующей пружины указывает на необходимость замещения рассмотренной конструкции колебательным звеном.
В качестве корректирующих элементов в неэлектрических системах автоматического регулирования широко применяются катаракты поршневого типа с упругим закреплением цилиндра. Схема такой конструкции, называемой иногда изодромом (см. п. 2, гл. I), представлена на рис. 42.
Положение цилиндра 1 фиксировано пружинами 2. Верхняя и нижняя полости цилиндра заполнены жидкостью и сообщаются
Рис. 41. Центробежный воспринимающий элемент:
- грузы; 2 - противодей-ствую1цая пружина; 3 - толкатель
через достаточно малое отверстие 3 (дюза), обладающее значительным гидравлическим сопротивлением.
Если перемещать входной шток поршня 4 со скоростью рХе, то из-за гидравлического сопротивления давления в полостях цилиндра не будут успевать выравниваться и со стороны поршня на цилиндр будет действовать сила, которая гызовет движение цилиндра и связанного с ним выходного штока 5 с некоторой скоростью рХых- Эта сила пропорциональна скорости перемещения поршня относительно цилиндра и, если пренебрегать силами инерции, в каждый момент времени уравновешивается силой реакции пружин:
Ki (рХех - рХеых) - КоХвьш
где Ki коэффициент, зависящий от размеров дюзы, вязкости жидкости и площади поршня; К 2 - жесткость пружины.
Отсюда, обозначив -~ = Т, получим
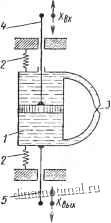
Рис. 42. Гидравлическое дифференцирующее устройство:
/ - цилиндр; 2 - пружина; S-дюза; 4-входной шток; 5 - выходной шток
что соответствует уравнению дифференцирующего звена (см. п. 2, гл. ill) и указывает на пропорциональность между скоростью входного штока рХвх и перемещением выходного штока Хвых-
В качестве корректирующих элементов в автопилотах применяются так называемые дифференцирующие (скоростные) гироскопы, дающие на выходе сигнал в виде углового отклонения, пропорционального угловой скорости вращения самолета относи тельно контролируемой его оси.
Преобразование линейных ускорений в перемещения можно выполнять с помощью акселерометров, использующих инерционные свойства массы свободно подвешенного груза. Если, например, система, изображенная на рис. 43, подвергнется воздействию длительно действующего ускорения Uex, направленного вверх, то будет наблюдаться некоторое установившееся смещение Xtx груза укрепленного на плоской пружине 2. Смещение направлено вниз относительно базы 3, жестко связанной с корпусом самолета. В переходном режиме, вообще говоря, движение груза может быть колебательным.
Роль груза в некоторых конструкциях выполняет достаточно массивная упруго-закрепленная управляющая сетка специальной
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [ 23 ] 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




