 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [ 28 ] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
источника питания U, а от конца этого отрезка под углом а = = arcctg к отрицательному направлению оси абсцисс проводится прямая, наклон которой характеризует величину сопротивления нагрузки. Точки пересечения этой прямой с соответствующими кривыми семейства вольт-амперных характеристик и определяют величины тока в схеме при соответствующих значениях температуры окружающей среды.
Таким образом, расчет датчиков на терморезисторах сводится к согласованию характеристики нагрузки и управляющего устрой-
ifi, amp; О;
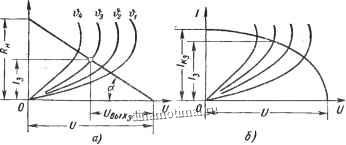
Рис. 53. К расчету схемы, изображенной на рис. 48, а: а - активная нагрузка; б - реактивная нагрузка
ства (семейства вольт-амперных характеристик терморезистора) так, чтобы точки пересечения их являлись точками устойчивого положения равновесия (см. гл. II и рис. 19). Это позволяет обеспечить непрерывную статическую характеристику.
Для случая, когда схема, изображенная на рис. 48, а, питается от источника переменного тока, а сопротивление нагрузки имеет чисто реактивный характер, вместо уравнения (72) будем иметь
а вместо (73)
что приводит к уравнению
и = Ixl + Ul.
(75)
Назовем током короткого замыкания / з условное значение тока Б схеме, которое возникло бы при сопротивлении ПТР, равном нулю. Тогда
Используя значение / з, нетрудно привести выражение (75) к следующему виду:
Это - каноническое уравнение эллипса с центром в начале координат и полуосями U и / laquo;з- Переменным U. и / геометрически соответствуют текущие координаты эллипса.
В данном случае вследствие сдвига фаз между падениями напряжений на ПТР и нагрузке линия нагрузки представляет собой не прямую, а эллипс. Ток в схеме, как и ранее, определится точками пересечения эллипса нагрузки с вольт-амперными характеристиками ПТР (рис. 53, б).
Заметим, что приведенный выше метод анализа установившихся режимов справедлив для цепей переменного тока только при постоянных времени ПТР, существенно превышающих длительность полупериода питающего напряжения. Иначе необходимо учитывать возникающие искажения формы тока (так как сопротивление терморезистора будет заметно меняться при изменениях мгновенных значений тока), а также фазовые запаздывания, обусловленные температурной инерционностью ПТР.
Наличие падающего участка на характеристике ПТР дает возможность не только использовать ПТР в пропорциональных режимах, но и создавать релейный эффект в цепях с ПТР. Для наглядности рассмотрим возникновение релейного эффекта на гримере той же схемы (рис. 48, а); для этого используем построения, приведенные на рис. 19.
Из графика (рис. 19, а) видно, что до некоторого значения температуры ее увеличение вызывает плавное увеличение тока в цепи, так как каждому новому значению температуры соответствует одна новая точка равновесия схемы, которая является устойчивой. По достижении некоторой температуры amp;2 ток скачком возрастает от значения /з до значения /з, так как положение /з является неустойчивым. В реальных схемах новое значение тока и соответственно выходного напряжения может быть в десятки раз больше предшествующего, т. е. имеет место резко выраженный релейный эффект.
Статическая характеристика схемы показана иа рис. 19, б. Гистерезисная петля получается при последующем понижении окружающей температуры, причем температура tla является температурой срабатывания, а температура ff-температурой отпускания. Тот факт, что статическая характеристика схемы получается несколько laquo;размытой raquo; по сравнению с типичной релейной характеристикой (рис. 5, б), обычно ие имеет существенного значения, и при анализе нелинейных систем чаще всего реальные релейные характеристики идеализируют, т. е. сводят их к виду рис. 5, б.
Из рис. 19, а следует, что условием возникновения релейного эффекта является касание характеристик в точке, где
\-п\ = (77)
где ri - дифференциальное сопротивление ПТР.
dTo значит, что в рассматриваемой схеме релейный эффект; можно получить не только путем изменения окружающей температуры, но также путем изменения величины сопротивления на грузки или даже путем изменения величины питающего напряжения и.
Условие (77) нужно рассматривать не только применительно к цепям с ПТР, а как более общее условие возникновения релейного эффекта Б нелинейных цепях. Нелинейное сопротивление при этом должно иметь многозначную вольт-амперную характеристику.
6. ДИНАМИЧЕСКИЕ ПАРАМЕТРЫ ДАТЧИКОВ И РЕЛЕ НА ТЕРМОРЕЗИСТОРАХ
Динамические параметры датчиков и реле на терморезисторах Б отличие от большинства других типов датчиков и реле могут быть рассчитаны сравнительно точно, поскольку их инерционность вызывается только явлениями нагрева и охлаждения термо-резистороБ.
Для области малых токов и небольших перегревов, соответствующих вольт-амперной характеристике вида (71), терморезисторы могут замещаться апериодическими звеньями вида
(Гр + 1) Дг - К@е (78)
где Qex - перегрев относительно исходной температуры; - приращение сопротивления; К = аг - передаточный коэффициент;
Т - постоянная времени, определяемая выражением (63). Для более значительных токов и перегревов величина сопротивления терморезистороБ, в особенности ПТР, меняется очень сильно, и при единичном воздействии процесс нагревания и охлаждения будет сильно отличаться от экспоненты, соответствующей нагреванию или охлаждению обесточенного ПТР или ПТР, на гружаемого малыми токами. Это существенно усложняет расчет подобных схем.
Установим соотношения, необходимые для определения зависимости перегрева ПТР от времени в случае подключения схемы (рис. 48, а) к напряжению U при неизменных температуре и состоянии окружающей среды. Пусть при этом начальный перегрев ПТР равен нулю, т. е. в = О при = 0.
Для решения этой задачи нужно исходить из уравнения теплового баланса для переходного процесса, которое в этом случае
Зная зависимость 6 (О, можно определить и зависимость / = / (О, а также все иные необходимые функциональные зависимости для переходного процесса.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [ 28 ] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




