 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 [ 34 ] 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
ствительность служит препятствием к широкому распространению тензорезисторов, которые в принципе могли бы применяться во многих случаях, например для определения деформаций мембран. Перспективны в зтом отношении полупроводниковые резисторы (тензолиты), которые имеют в десятки раз большие относительные изменения сопротивления при деформациях. Однако они имеют большой коэффициент температурного сопротивления и, самое главное, пока недостаточно стабильны во времени.
Подчеркнем, что температурная зависимость, как всегда, может быть уменьшена применением дифференциальной или
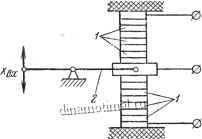
Рис. 65. Угольный реостат (реверсивный):
/ - графитовые диски; 2 - рычаг
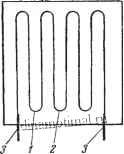
Рис. 66. Тензорезистор:
/ - проволока; 2 - бумага; 3 - выводы
мостовой схемы. В этом случае наиболее рациональной будет дифференциальная схема (рис. 3, д и 48, б), в которой балластное сопротивление будет представлять собой компенсационный тензорезистор. В дифференциальной схеме, изображенной на рис. 49, в, оба плеча являются рабочими, если удается выполнить элементы одинаковой чувствительности, но с характеристиками противоположного знака. Для рассматриваемого примера это можно достигнуть двумя способами: либо использовать такую пару тензорезисторов, чтобы один из них при растяжении увеличивал свое сопротивление, а другой уменьшал; либо расположить два одинаковых тензорезистора так, чтобы один из них при деформации детали подвергался растяжению, а другой - сжатию. Последний вариант легко осуществить при изменении деформаций тонких стенок (например, стенок мембраны), если расположить тензорезисторы друг против друга на противоположных сторонах стенки.
В последнее время все чаще применяются тензорезисторы, в которых проволока на бумаге заменена тонкой металлической фольгой, впрессованной в пластмассовую пленку. Фольговые датчики имеют ряд преимуществ: меньшая толщина, более на-
дежная конструкция выводов, лучшая влагостойкость и др. Перспективно также применение гибких резисторов из органических полупроводников.
6. ИНДУКТИВНЫЕ И ЕМКОСТНЫЕ ДАТЧИКИ
В отличие от рассмотренных выше датчиков в индуктивных и емкостных датчиках управляющими устройствами являются переменные реактивные сопротивления, поэтому питание схемы должны получать от источника переменного тока. В индуктивных датчиках таким переменным сопротивлением является дроссель с переменным воздушным зазором. В простейшей нереверсивной схеме (рис. 67, а) обмотка дросселя включается последовательно с сопротивлением нагрузки Z к источнику питания и = const. При изменении величины воздушного зазора Х. будет меняться и индуктивность дросселя Lgp, а следовательно, и его сопротивление переменному току
Zdp = Y~dp + (s-oUpf В результате будет меняться ток в цепи /дых и соответственно падение напряжения на нагрузке
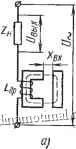
Рис. 67. Датчики перемещения с меняющимися реактивными сопротивлениями:
а - простейшая схема нереверсивного индуктивного датчика; б - просчейшая схема нереверсивного емкостного датчика; в - статическая характеристика нереверсивного индуктивного датчика
Для случая активно-индуктивной нагрузки Z = + (toL )
имеем
вых - вых-н -
ViK+rSpf + iu + hpf
(94)
где индуктивность дросселя является функцией величины зазора Xgx- При уменьшении зазора индуктивность увеличивается и выходное напряжение плавно уменьшается.
Для уменьшения потерь на перемагничиваиие и вихревые токи якорь и сердечник дросселя выполняются обычно шихтованными.
Очевидно, для преобразования перемещения в изменение выходного напряжения могут быть использованы и конденсаторы переменной емкости - емкостные датчики (рис. 67, б). Изменение емкости можно получить изменением расстояния между электродами или чаще - изменением площади взаимного перекрытия электродов, а также вдвигая и выдвигая между неподвижными
4*лекгродами диэлектрик с оольшои диэлектрической проницаемостью. В последнем случае подвижные контактные соединения отсутствуют.
Емкость датчиков составляет обычно всего лишь тысячные доли микрофарады. Это требует для повышения выходной мощности специального высокочастотного питания. Кроме того, необходим весьма тщательный монтаж во избежание влияния емкости подводящих проводов.
В наземных устройствах емкостные датчики для повышения чувствительности иногда включают в резонансные схемы. Датчик включается в резонансный контур, настроенный в резонанс с частотой источника питания при значении емкости, соответствующей исходному положению подвижных частей. Тогда даже небольшое перемещение будет сопровождаться расстройкой контура и значительными изменениями выходного тока. Однако в авиационных условиях трудно обеспечить необходимую точность работы резонансной схемы как из-за невысокой точности поддержания частоты бортовой сети, так и из-за температурной нестабильности элементов контура.
Отмеченные обстоятельства препятствуют широкому применению емкостных датчиков в авиационной автоматике (для стационарных установок они вполне пригодны). Индуктивные же датчики, у которых в принципе также уменьшается вес с повышением частоты, работают вполне удовлетворительно уже на обычных частотах бортовой сети и в связи с возросшим применением переменного тока на самолетах приобретают очень большое значение. Их важное преимущество в сравнении с потенциометрическими датчиками заключается в отсутствии скользящих контактов и более высокой чувствительности, достигающей сотен вольт на миллиметр. Выходная мощность может составлять десятки ватт.
Нереверсивной схеме индуктивных датчиков, показанной на рис. 67, а, соответствует статическая характеристика, приведенная на рис. 67, в. Для зазора средней величины эта характеристика более или менее близка в линейной. При нулевом зазоре индуктивность Lgp хоть и будет наибольшей, но она не равна бесконечности, а потому и выходное напряжение Увы;, как следует из выражения (94), не равно нулю.
Рассмотренная простейшая схема не находит практического применения в основном из-за возникновения больших усилий между якорем и сердечником дросселя. Якорь может притягиваться к сердечнику с силой до нескольких килограммов, что обычно совершенно недопустимо для воздействующих на индуктивный датчик элементов (гироскоп, сильфонный датчик давления и т. п.).
В связи с этим реверсивная схема датчика не может представлять собой просто два однотактных датчика, включенных в элек-фическую дифференциальную схему и механически не связанных
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 [ 34 ] 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




