 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 [ 36 ] 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
Для определения перегрева индуктивного датчика используем уравнение теплового баланса (68), которое для данного случая должно быть написано в виде
fr,p + = t]Se, (101)
где Гдр - активное сопротивление обмотки;
- мощность потерь на вихревые токи и на перемагничива-ние в магнитопроводе. Тяговые усилия, которым подвергается якорь индуктивного датчика, рассчитываются способами, указанными в гл. VII применительно к электромагнитам. При этом соответствующая данному воздушному зазору Х намагничивающая сила на основании выражения (98) будет
8. ОСНОВЫ РАСЧЕТА РЕВЕРСИВНЫХ ИНДУКТИВНЫХ ДАТЧИКОВ
Статические характеристики реверсивных индуктивных .датчиков можно рассчитать различными методами электротехники и в различной последовательности в зависимости от того, какие параметры заданы и какие нужно определить, каковы общие требования к датчику и т. д. Статическая характеристика дифференциального датчика, нагрузкой которого являются две противоположно включенные обмотки, может быть найдена путем вычитания выходных токов или напряжений обеих ее половин. В других случаях целесообразнее воспользоваться теоремой об эквивалентном источнике, определяя вначале напряжение на выходе ненагруженной схемы Овых (напряжение холостого хода мостовой или дифференциальной схемы), а затем рассматривая эту схему как источник э. д. с, равной /вмо- Этот источник обладает внутренним сопротивлением Zeux, равным выходному сопротивлению схемы (сопротивлению, измеренному со стороны зажимов, к которым подключается нагрузка Z ).
Тогда
вых -г
9. СЕЛЫ:ИНЫ
Сельсин представляет собой миниатюрную электрическую машину, в обычном исполнении сходную с синхронным генератором или двигателем. Чаще всего ротор сельсина имеет одну обмотку, а статор три обмотки, оси которых сдвинуты на 120 deg; одна относительно другой.
Сельсины используются в основном в двух режимах: в индикаторном и в трансформаторном (рис. 70). Они обычно работают
в паре: сельсин -датчик (СД), связанный с входным валом, и сельсин-приемник (С/7), связанный с выходным валом.
Роторы обоих сельсинов получают питание от одного источника переменного тока статорные обмотки сельсинов соединены между собой, как показано на рис. 70, а. При одинаковом положении валов токи в соединяющих проводах отсутствуют. Если входной вал повернуть на некоторый угол, то в соединяющих проводах появятся токи и при жестко закрепленном входном вале вызовут у приемника момент, стремящийся свести угол рассогласования Xg = laquo;а - а к нулю. Однако этот момент весьма мал и практически достаточен лишь для перемещения стрелок или других указательных устройств. Поэтому индикаторный режим в системах автоматического регулирования не применяется.
Трансформаторный режим работы сельсинов широко применяется в следящих системах (сервосистемах), предназначенных для осуществления синхронного и синфазного вращения двух валов, механически между собой не связанных. Один из валов является входным (например, вал стрелкового прицела) и обычно требует для своего перемещения небольших усилий, другой-выходным (например, вал, связанный с самолетной пушкой) и, как правило, для его перемещения необходимы значительные усилия.
В этом случае питающее напряжение подается только на один из роторов, обычно на ротор сельсина-датчика (см. рис. 70, б). Статорные обмотки также соединены, как показано на рисунке. С обмотки ротора сельсина-приемника снимается напряжение f/g,.
Выходное напряжение будет равно нулю при разности углов поворота 90 deg;, так как результирующий поток в этом случае не будет пересекать витков обмотки ротора приемника. Это положение и принимается за нулевое. Любое рассогласование сопрово-лодается появлением напряжения на выходе, причем величина выходного напряжения в распространенных конструкциях является функцией синуса угла рассогласования
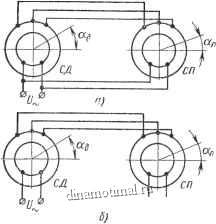
Рис. 70. Схемы включения сельсинов:
индикаторный режим; б - трансформаторный режим
аых = К sin Xgx,
где К I в/град и Х = - а .
Для достаточно малых углов можно полагать
Ue.x = КХдх. (105)
Важно отметить, что эти выражения отражают не только зависимость эффективного значения (модуля) выходного напряжения от угла рассогласования, но и зависимость фазы этого напряжения от знака рассогласования; при изменении знака рассогласования фаза выходного напряжения меняется на 180 deg;. Характер изменения мгновенных значений выходного напряжения при этом аналогичен показанному на рис. 62, е применительно к потенциометру переменного тока, если изменения угла рассогласования происходят по закону, указанному на рис. 62, а.
Сельсинная пара рассматривается как безынерционное устройство. Точность обычных сельсинов, как правило, не превышает десятых долей градуса. Главной причиной возникающих погрешностей являются неизбежные дефекты изготовления: электрическая и магнитная несимметрия, неточная центровка и эллиптичность ротора и т. п. Указанные выше точности во многих случаях не соответствуют требованиям, предъявляемым к соответствующим следящим системам. Для повышения точности применяются двухканальные устройства.
Сущность двухканальных устройств заключается в том, что в следящей системе применяются две сельсинные пары: пара грубого канала, роторы которой непосредственно связаны с входным и выходными валами, и пара точного канала, роторы которой соединены с этими валами через повышающие редукторы с одинаковым передаточным числом. Нулевые положения грубого и точного канала делают совпадающими, но показания точного канала могут быть использованы только в пределах малого угла рассогласования, определяемого коэффициентом редукции. За пределами этого угла появляется неоднозначность, и по величине э. д. с. сельсина-приемника точного канала уже нельзя судить о действительном рассогласовании валов подобно тому, как нельзя определить время дня, взглянув только на минутную стрелку часов. В пределах же указанного угла точный канал дает, разумеется, гораздо более высокую точность. Поэтому грубый канал работает в системе только при больших углах рассогласования. По достижении малых углов рассогласования система с помощью соответствующих релейных устройств (поляризованные реле, неоновые лампы и пр.) автоматически переводится на точный канал. При возрастании рассогласования осуществляется обратное переключение.
Двухканальный принцип может быть использован и в других устройствах автоматики, например для преобразования давления газа в перемещение с помощью мембран (более жесткая и достаточно прочная мембрана работает при больших перепадах дав-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 [ 36 ] 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




