 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 [ 38 ] 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
Глава VIb
ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ В ПЕРЕМЕЩЕНИЕ
\. ЭЛЕКТРОМАГНИТНЫЕ ЭЛЕМЕНТЫ
Электромагнитный элемент представляет собой совокупность электромагнита, который выполняет роль управляющего устройства, и перемещаемой им механической нагрузки. Нагрузкой при этом могут быть, например, разрывные контакты (в электромагнитных реле), потенциометр или золотниковое устройство (в электромагнитных датчиках), руль (в системах автоматического управления полетом беспилотных аппаратов), реакция потока газа или жидкости (в электромагнитных клапанах) вместе с соответствующими возвратными пружинами, противодействующими тяговым усилиям электромагнита. Уже из этих примеров видно, что электромагнитные элементы могут выполнять в авиационных автоматических устройствах самые разнообразные функциональные задачи.
Будет ли иметь электромагнитный элемент релейную или пропорциональную статическую характеристику - это зависит (см. п. 4, гл. И) от надлежащего согласования тяговых и механических характеристик элемента (см. рис. 17 и 18).
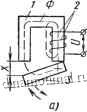
Конструкции электромагнитов весьма разнообразны, но всегда основными частями электромагнита являются неподвижный стальной магнитопровод 1 с расположенной на нем обмоткой 2 и подвижный якорь 3 (рис. 72).
Форма электромагнита, приведенная на рис. 72, а, часто применяется для реле, получающих питание от источника постоянного тока.
Форма электромагнита, изображенного на рис. 72, б, используется как в реле, так и в датчиках. Существенным преимуществом такой конструкции для беспилотных авиационных устройств, подвергающихся большим ускорениям, является механическая уравновешенность якоря. В этом случае практически сказываются лишь те ускорения летательных аппаратов, направления которых совпадают с направлением вращения якоря.
Одним из распространенных электромагнитных элементов в автоматических устройствах являются электромагнитные реле постоянного тока. При этом наиболее часто встречаются электромагнитные реле, у которых перемещающийся электромагнит вызывает замыкание или размыкание электрических контактов, коммутирующих выходную цепь. В этом случае элемент, в котором электромагнитное реле выполняет роль управляющего устройства, будет являться элементом с промежуточным преобразованием форлчы энергии; эти элементы уже представляют собой электромеханические усилители (см. п. 1, гл. VHI) или, точнее, релейные усилители с электромагнитными реле. Достаточно мощные реле такого типа принято называть контакторами.
Магнитопровод и якорь реле постоянного тока выполняются сплошными из ферромагнитных материалов. Обмотки реле, как и других электрических элементов (индуктивные датчики, магнитные усилители и пр.), выполняют проводом с хлопчатобумажной, шелковой, эмалевой
и синтетической (винифлекс, металвин и др.) изоляцией. Большие возможности открывает применение температуростойкой стеклянной изоляции, что позволяет повысить допустимые рабочие температуры обмоток и уменьшить их размеры.
Динамические свойства электромагнитных элементов зависят, очевидно, как от их электрических, так и от механических параметров. Электромагнитные датчики, если пренебречь их инерционностью нельзя, приходится замещать апериодическими или даже колебательными звеньями. Динамические свойства электромагнитного реле, строго говоря, характеризуются временами срабатывания и отпускания. Но при анализе систем автоматического регулирования, если нельзя пренебречь инерционностью реле, era обычно характеризуют общим для срабатывания и отпускания временем запаздывания (см. п. 2, гл. HI).
Рис. 72. Некоторые формы электромагнитов:
а - клапанныП; б - поворотный jpaEHO-вешенный; /-магнитопронод; г - обмотка; 5 - подвижный якорь
2. РАСЧЕТ ТЯГОВЫХ ХАРАКТЕРИСТИК
Основной характеристикой электромагнитных элементов является тяговая характеристика, т. е. зависимость тяговых усилий от положения якоря при постоянной величине напряжения питания и = const (см. п. 4, гл. П), т. е. при Х = const.
В общем случае расчет тяговых характеристик выполняется с использованием лчетода энергетического баланса, основанного
на анализе изменений энергии магнитной системы при перемещении якоря.
Представим себе сначала, что электромагнит с фиксированным воздушным зазором подключен к источнику постоянного токи с напряжением U. Процесс изменения тока в обмотке реле, характеризуемой активным сопротивлением г и индуктивностью, которая в общем случае будет зависеть от степени насыщения стали, определится выражением
- + = (10)
где г5 - потокосцепление обмотки, которое для случая, когда все ее витки w сцепляются с одним и тем же магнитным потоком Ф,
равно
ф = шф.
Умножив обе части выражения (108) на i dt и интегрируя его в пределах от О до t, получим
I ij lt; -
J ir dt + J i d = J Ui dt, (109)
откуда
{Ui-Pr)dt =
tdil). (110)
Левая часть полученного выражения представляет собой разность энергии, отданной источником за время t, и энергии, перешедшей в тепловую форму в активном сопротивлении г. Очевидно, что именно эта разность и представляет собой энергию, запасенную Б магнитном поле электромагнита.
Рассмотрим теперь энергетический баланс в электромагните, который получает питание от источника постоянного тока U, при перемещении якоря из положения ъ положение Xj-
Если магнитная цепь (на пути магнитного потока) имеет воздушный зазор с магнитной проводимостью С, то для обеспечения того же значения магнитного потока Ф (или того же потокосцеп-ления 1р = Фш) необходимо как наличие н. с. OA = Iw (рис. 73, а) для создания магнитного потока в магнитопроводе, так и наличие н. с. OA = ОА = Iwg для создания магнитного потока в воздушном зазоре.
Результирующая кривая чррез = h Ц) при этом может быть получена путем смещения отдельных точек кривой ilx = f {1ж)х на величины {Iw)ex, отвечающие данным значениям Из построения следует, что площадь ОВВ равна площади ODC = ОВВ (см. рис. 73, а).
Общая величина магнитной энергии определится теперь ве-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 [ 38 ] 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




