 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 [ 49 ] 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
Малое расстояние между контактами и малая инерционность подвижных частей обеспечивают высокое быстродействие реле - время срабатывания достигает 10 мксек.
11. ИСПОЛНИТЕЛЬНЫЕ ЭЛЕКТРОДВИГАТЕЛИ
Электродвигатели в системах автоматического регулирования выполняют роль исполнительных элементов (серводвигателей). Они используются для отклонения рулей (электрические рулевые машинки), перемещения пушек, пулеметов и радиолокационных антенн, перемещения управляющих органов авиадвигателей и др.
Б) - в)
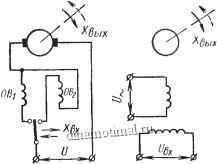
Рис. 91. Схемы включения исполнительных электродвигателей:
а - постоянного тока с независимым возбуждением; б- постоянного тока с последовательным возбуждением; б - двухфазного
Наиболее часто в авиационных системах автоматического регулирования применяются электродвигатели трех типов: постоянного тока с независимым возбуждением, постоянного тока с последовательным возбуждением и двухфазные асинхронные, принцип действия и теория которых известны из курса электрических машин. Реверсивные схемы включения этих двигателей приведены на рис. 91.
Скорость вращения двигателя с независимым возбуждением пропорциональна величине входного напряжения, подведенного к якорю, а направление вращения определяется знаком напряжения. Входное напряжение на электродвигатель, как правило, поступает от электромашинного усилителя (см. гл. VIII), при этом
где /д - ток, протекающий в цепи якоря; - сопротивление цепи якоря; Се - коэффициент противо-э. д. с.
Вращающий момент на валу двигателя Мд = CJ , где -. коэффициент момента.
Значения коэффициентов и зависят от порога возбуждения и конструктивных параметров и могут быть определены по паспортным данным двигателя, где обычно указываются U o ,
н0м1 rioM
Тогда
вх ном I homRr вх ном - I homRr
Школ П
9.81
При идеальном холостом ходе /д = О (УИ = 0) и соу, =
= -Uex, т. е. характеристика двигателя проходит через начало
координат (рис. 92, а). При наличии момента нагрузки на валу (УИ =h 0) двигатель начнет вращаться при достижении Не. =
= и трог причем Мде = М = С/ , ТОГДа / = И 6, p = --7 Кя.
в пределах от = О до f/ex = plusmn; fmpoa будет иметь место зона нечувствительности.
Еспи, как это обычно бывает возможным, не учитывать влияния индуктивности обмотки якоря, то переходные процессы в двигателе описываются уравнением апериодического звена:
{Тр + 1)со laquo; , = KUex, (152)
где Т - так называемая электромеханическая постоянная двигателя, зависящая от электрических и механических конструктивных параметров двигателя, а также от момента инерции нагрузки, приведенной к валу двигателя; К - передаточный коэффициент, равный отношению установившейся скорости при данной нагрузке к входному напряжению.
Обычно для обеспечения быстродействия и надежности работы при загустении смазки, небольших заеданиях и других обстоятельствах берутся большие запасы по мощности двигателя и, учитывая наличие понижающего редуктора, в первом приближении можно пренебречь сопротивлением нагрузки. В этом случае удобно определять передаточный коэффициент и постоянную времени через внешние параметры двигателя: установившуюся скорость холостого хода двигателя совьхх при номинальном напряжении Vex ном,
Излишний запас по мощности вредно сказывается иа быстродействии, так как более крупный электродвигатель сам по себе обладает большей инерционностью (подробнее см. п. 4, гл. XVI).
пусковой момент при том же напряжении и момент инерциц вращающихся частей /, который из-за наличия понижающего редуктора обычно превышает момент инерции ротора всего на 10-20%.
Используя выражение (152) для установившегося режима, находим
шр (153)
вХ НОМ
в начальный момент включения двигателя его скорость
= о, (154)
а величина ускорения на основании второго закона Ньютона буде-
pco laquo; .=-i. (155)
Используя выражение (152)
j gt; KUex - (i gt;eblx
Рвых
и начальные условия (154) и (155), получим
ды raquo;
Т= - . (156)
При анализе систем автоматического регулирования Ражно знать положение регулирующего органа объекта, поэтому выход ной величиной исполнительных двигателей обычно полагают не скорость вращения, а угол поворота вала двигателя Х скольку
уравнение двигателя принимает вид
р {Тр + \)Xg,x = Ки,х, (157)
где К и Т сохраняют свои прежние значения.
Соответственно этому передаточная функция имеет вид
ИЛИ Б другом виде
1 К
Г(р) =
Таким образом, в этом случае электродвигатель с независимым возбуждением замещается двумя последовательно соединенными звеньями - интегрирующим и апериодическим.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 [ 49 ] 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




