 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 [ 50 ] 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
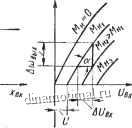
Электродвигатели постоянного тока с последовательным возбуждением (сериесные), обладающие, как известно, повышенными, пусковыми моментами, для получения возможности реверса включаются через контактное устройство по схеме, приведенной на рис. 91, б. В результате и сам привод приобретает типичную релейную статическую характеристику (рис. 92, б). Здесь Х - перемещение подвижного контакта относительно среднего положе-dXebix - установившаяся скорость вращения дви-
ния, а соьи =
гателя при данной величине питающего напряжения U.
UmpDZf | ||
mpozt
Рис. 92. Статические характеристики исполнительных электродвигателей:
о - постоянного тока с независимым возбуждением; б-постоянного тока с последовательным возбуждением; в - двухфазного
Электромеханические постоянные исполнительных двигателей имеют порядок десятых (для двигателей мощностью около 1 кет) или сотых долей секунды. Поэтому иногда вместо схемы, изображенной на рис. 91, б, применяется привод с постоянно вращающимся двигателем и управляемыми муфтами (см. п. 1, гл. IV).
Асинхронные двухфазные двигатели имеют тонкостенный полый ротор и две обмотки на статоре, магнитные оси которых смещены на 90 deg; (см. рис. 91, б). Одна из обмоток возбуждается от вспомогательного (опорного) напряжения переменного тока {У. , на другую подается входное переменное напряжение Ид той же частоты.
Для ограниченных пределов изменения входного сигнала характеристики асинхронного двухфазного двигателя (рис. 92, е) аналогичны характеристикам двигателя постоянного тока с независимым возбуждением (при этом конструктивные параметры двигателя выбираются с учетом обеспечения работы его при скольжении gt; 1). Тогда в первом приближении можно считать, что laquo;выл = CJJgx, а Мпуск = C Ugx, при этом коэффициенты и
Cj следует определять из паспортных характеристик двигателя. На прямолинейных участках этих характеристик
fco = =tga (рис. 92, б),
тогда L p=-g-.
Индукционные элетсгродвигатели превосходят размерами двигатели постоянного тока, но отсутствие коллектора делает их более надежными и уменьшает трение, а следовательно, и всегда имеющуюся в действительности (хотя и не всегда учитываемую) зону нечувствительности.
В первом приближении (при малых входных сигналах) переходные процессы в асинхронном двухфазном двигателе могут быть описаны теми же уравнениями, что и в двигателе постоянного тока с независимым возбуждением.
В последнее время находят применение асинхронные двигатели с внутренним поворотным статором - так называемые laquo;совмещенные сельсин-двигатели raquo;, позволяющие плавно регулировать и реверсировать двигатели без добавочных усилительных и контактных устройств.
Глава VIII
ЭЛ ЕКТРОМЕХАН И Ч ЕСКИ Е, Ф ЕРРОМАГНИТН Ы Е И ДИЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ
1. ЛИНЕАРИЗОВАННЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ РЕЛЕЙНЫЕ УСИЛИТЕЛИ
В гл. VII было отмечено, что наиболее распространенными из электромагнитных элементов являются электромагнитные реле, которью используются в качестве управляющих устройств с промежуточным преобразованием формы энергии в релейных усилителях.
При этом релейный элемент будет выполнять функции усилительного элемента, поскольку мощности, напряжения и токи в коммутируемой контактами (т. е. выходной) цепи могут значительно превышать мощности, напряжения и токи, потребляемые обмоткой реле при срабатывании.
Если иметь в виду подачу входных сигналов, незначительно превышающих мощность срабатывания, то при условии применения искрогасительных схем отношение мощности на выходе к мощности на входе может доходить до 10*-10 .
Однако релейный вид статических характеристик таких усилителей часто отрицательно сказывается на качестве регулирования. Для устранения этого недостатка применяется вибрационная линеаризация релейных усилителей (см. п. 3, гл. II).
Схема линеаризации поляризованного реле за счет внешних колебаний показана на рис. 93, а. Поляризованное реле, кроме входной обмотки, имеет еще дополнительную линеаризирующую обмотку, на которую подается вспомогательное напряжение переменного тока и л с неизменной амплитудой Хщ = f/im и часто-
Частота вспомогательного линеаризирующего напряжения должна быть такой, чтобы длительность полупериода была существенно (минимум в 3 раза, а желательно в 5-10 раз) больше вре-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 [ 50 ] 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




