 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 [ 51 ] 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
мени срабатывания реле. Для четкого воспроизведения сигнала требуется, чтобы частота линеаризирующего напряжения была также существенно (в 5-10 раз) больше максимальной частоты входного напряжения (см. п. 3, гл. II). Таким образом, длительность полупериода максимальной частоты, пропускаемой системой, должна быть минимум в 15 раз больше времени срабатывания реле, т. е. к быстродействию реле предъявляются более высокие
требования, чем при использовании их непосредственно в качестве релейного усилителя.
При рассмотрении процессов в линеаризированном усилителе для упрощения будем пренебрегать временем срабатывания реле, т. е. будем полагать, что переключение контактов реле происходит сразу после достижения значений н. с. срабатывания, а настройку реле будем полагать двухпозицион-ной, что соответствует релейной характеристике (рис. 82, а).
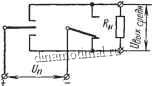
Рис. 93. Линеаризованные релейные усилители:
а - линеаризация с помощью . внешних колебаний; б - линеаризация с помощью автоколебаний; е и г - варианть! выходной части схем
Если входной сигнал равен нулю и управляющий магнитный поток в поляризованном реле создается только линеаризирующей обмоткой, то реле переключает свои контакты в каждый полупериод линеаризирующего напряжения, причем длительность замыкания верхнего и нижнего контактов (см. рис. 9) будет одинаковой. Резисторы в выходной цепи, получающие питание от вспомогательного источника постоянного тока f/ (за счет энергии источника и достигается эффект усиления), включены так, что при замыкании верхнего контакта на выходе появляется импульс одного знака (условно положительного), а при замыкании нижнего
контакта - другого знака (условно отрицательного). Амплитуды и длительности этих импульсов одинаковы, а следовательно, постоянная составляющая выходного напряжения равна нулю.
При появлении входного сигнала f/g, который из-за медленного изменения интенсивности можно рассматривать как постоянный, н. с. входной обмотки в один из полупериодов линеаризирующего напряжения складывается с н. с. линеаризирующей обмотки, а в другой полупериод - вычитается. Это приводит к тому, что длительность замыкания контактов, а следовательно, и длительность импульсов становится неодинаковой, как это показано на рис. 10. В результате в выходном напряжении появляется постоянная составляющая шлрейд, знак которой будет определяться знаком входного напряжения, а величина будет плавно меняться при изменении величины входного напряжения.
Линейная зависимость
laquo; laquo;ср.а laquo; = KIWex (158)
будет наблюдаться только при пилообразной форме линеаризирующих колебаний (см. п. 3, гл. II). Для синусоидальной формы колебаний функциональная зависимость носит характер арксинусоиды ивыхред ~ Karcsin Uex и обычно для небольших сигналов может быть линеаризована.
Для сохранения состояния линеаризации входной сигнал должен быть меньше разности между амплитудным значением н. с. линеаризирующей обмотки и н. с срабатывания реле (см. рис. 10):
Линеаризованный релейный усилитель может быть замещен пропорциональным звеном, и выражение (158) будет справедливо также для динамического режима только при достаточно медленном изменении входного сигнала. Если пренебрегать временем срабатывания реле нельзя, то усилитель принято замещать двумя последовательно соединенными звеньями: пропорциональным звеном и звеном с постоянным запаздыванием.
Уравнение линеаризованного усилителя тогда принимает вид (см. п. 2, гл. III).
Veux,p,g,=={t-t,)KiUex
ИЛИ в операторной форме
= (159)
где время запаздывания представляет собой время срабатывания реле tgpas-
Линеаризация за счет отрицательной обратной связи может быть осуществлена по схеме, изображенной на рис. 93, б. В этой схеме роль линеаризирующей обмотки выполняет обмотка обратной связи, на которую подается напряжение такой полярности, что
реле срабатывает и переключает свои контакты. Но при этом происходит изменение полярности напряжения на обмотке и реле опять срабатывает, возвращаясь в исходное положение, и т. д. Если входной сигнал равен нулю, то реле периодически переключает свои контакты с частотой, зависящей от времени срабатывания реле, причем длительность замыкания верхнего и нижнего контактов будет одинаковой, а постоянная составляющая выходного напряжения ивыхрд При этом будет равна нулю.
В данном случае роль линеаризирующих колебаний выполняют автоколебания, которые появляются в результате введения в релейный элемент отрицательной обратной связи. Для повышения устойчивости автоколебаний за счет некоторого снижения их частоты в схему вводится конденсатор, который благодаря запасаемой энергии несколько замедляет процесс изменения тока в обмотке обратной связи при чередовании импульсов. Одновременно этот конденсатор улучшает искрогашение на контактах.
При появлении входного напряжения в этой схеме, как и в предыдущих, нарушается равенство длительности замыкания контактов и в выходном напряжении появляется постоянная составляющая ивыхдрдд, которая связана с входным напряжением непрерывной функциональной зависимостью. Для небольших сигналов эта зависимость может быть линеаризована и сведена к виду выражения (158), а при необходимости учета запаздывания - к виду выражения (159).
В результате вибрационной линеаризации релейного усилителя существенно меняется и поведение элементов, получающих питание от усилителя. Так, исполнительный двигатель с последовательным возбуждением (см. рис. 92, б), получающий питание через контакты линеаризованного усилителя, будет обладать уже не релейной, а пропорциональной характеристикой. Если не учитывать малых колебаний якоря с линеаризирующей частотой, то скорость якоря будет пропорциональна входному напряжению усилителя, контакты которого управляют двигателем. Очень важно при этом, что вибрационная линеаризация позволяет устранить зону нечувствительности
Особенно большое значение линеаризованные усилители имеют для беспилотной авиации в связи с их легкостью, компактностью и дешевизной.
2. РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК УСИЛИТЕЛЕЙ, ЛИНЕАРИЗОВАННЫХ ЗА СЧЕТ ВНЕШНЕГО ПЕРЕМЕННОГО НАПРЯЖЕНИЯ
Получим уравнение статической характеристики fJetixpeg f (IJex) электромеханического усилителя (см. рис. 93, а), полагая, что этот усилитель выполнен на двухпозиционном поляризованном реле, и пренебрегая временем срабатывания последнего.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 [ 51 ] 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




