 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Статические характеристики элементов
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 [ 66 ] 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127
влияние процессов; происходящих в цепи нагрузки, на условия перемагничивания laquo;управляемого raquo; сердечника. Переключение диодов- осуществляется переменным напряжением Uk~, которое выполняет функции напряжения смещения.
Величина напряжения смещения, как и в схеме, изображенной на рис. П5, а, определяет положение статической характеристики относительно оси ординат.
В управляющем полупериоде к входной обмотке хю приложено напряжение, равное t7 . ---t/ . При малом входном
сопротивлении также справедливо уравнение статической характеристики (230).
Схемы с диодным разделением управляющих и рабочих полупериодов (рис. П5, б, П7, б) принято называть усилителями с самонасыщением.
Они отличаются от магнитных усилителей с внешней обратной связью меньшим числом обмоток и меньшими потерями в активном сопротивлении обмоток. Поэтому в подавляющем большинстве случаев современные .магнитные усилители, в том числе и с выходом на переменном токе, выполняют по схеме с диодным разделением управляющего и рабочего полупернодов.
При одинаковом числе витков входных обмоток быстродействующие и обычные усилители имеют примерно одинаковое усиление по току.
Существенное снижение инерционности быстродействующих усилителей по сравнению с обычными достигается за счет существенного снижения коэффициентов усиления по напряжению и мощности, а также соответствующего повышения мощности источника входного сигнала по сравнению с входной мощностью обычных усилителей.
Поэтому приведенные схемы (рис. П5, б, И7, б) быстродействующих усилителей менее пригодны для маломощных усилителей, чем обычные схемы. Кроме того, они предъявляют более жесткие требования к прямоугольности петли гистерезиса.
13. РЕВЕРСИВНЫЕ ЛгЛГНИТНЫЕ УСИЛИТЕЛИ
в системах автоматического регулирования чаще используются реверсивные (двухтактные) магнитные усилители, у которых при нулевом входном токе выходной ток также равен нулю, а изменение полярности входного тока сопровождается изменением на 180 deg; (опрокидыванием) фазы выходного тока.
Рассмотрим различные варианты реверсивных конструктивных схем магнитных усилителей.
На рис. 118 представлена схема дифференциальрюго магнитного усилителя, которая получена путем встречного включения двух нереверсивных усилителей с обмотками смещения, под
соединенными так, что если в одной паре сердечников складываются управляющий (входной) магнитный поток и поток смещения, то в другой паре эти потоки вычитаются.
Схема мостового магнитного усилителя приведена на рис. 119. Все плечи моста являются активными, причем выходные обмотки
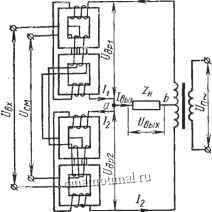
Рис. 118. Дифференциальный магнит- Рис. 119. Мостовой магнитный уси-ный усилитель литель
парных сердечников включены в противоположные плечи. Схема не требует двух находящихся в противофазе питающих напряжений и поэтому не нуждается в трансформаторе. Но это преиму-
разумеется, лишь в том случае.
щество можно использовать, когда величина питающего переменного напряжения достаточна для получения требуемого значения выходного напряжения.
Если требуемое выходное напряжение значительно превышает напряжение источника питания, применяются трансформаторные магнитные усилители (рис. 120). Эти усилители успешно применяются не только для усиления мощности, но и для усиления напряжения (в режиме, близком к холостому ходу), причем коэффициент усиления по напряжению часто имеет порядок нескольких тысяч.
Трансформаторные реверсивные (двухтактные) усилители состоят из двух пар трансформаторов (а не дросселей) насыщения. Их устройство отличается тем, что напряжение источника питания иа~ подается непосредственно на специальные (первичные)
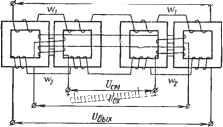
Рис. 120. Реверсивный трансформаторный магнитный усилитель
обмотки Wi, а на нагрузку подается питание от вторичных обмоток ы), которые включены так, что их э. д. с. взаимно уничтожаются и выходное напряжение равно нулю. При появлении входного тока взаимная индуктивность первичной и вторичной обмзток одрюго трансформатора увеличивается, а другого уменьшается. В результате на выходе появляется напряжение, величина которого зависит от величины входного тока, а фаза при изменении полярности входного тока меняется на 180 deg;.
Двухтактные усилители с выходом на переменном токе часто выполняются путем включения двух одинаковых однотактных усилителей с самонасыщением по дифференциальной схеме (рис. П7, в) аналогично схеме, приведенной на рис. 118, для усилителей без самонасыщения.
14. РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК РЕВЕРСИВНЫХ СХЕМ
Реверсивные схемы магнитных усилителей (например, на рис. 118) относятся к частному случаю нелинейных дифференциальных схем переменного тока с активными и реактивными резисторами, расчет которых в общем случае связан со значительными трудностями. Все высказанные при расчете соображения и полученные результаты нужно рассматривать как общие для элементов, имеющих дифференциальные конструктивные схемы переменного тока с активными и реактивными управляющими устройствами.
Расчет статической характеристики / х = / (ел) не может, разумеется, сводиться к алгебраическому вычитанию токов /j и 7.2. Прежде всего /, и /о - это не токи отдельно рассматриваемых верхнего и нижнего нереверсивных усилителей, а взаимно связанные контурные токи схемы (рис. 118). Кроме того, эти токи сдвинуты относительно друг друга по фазе.
Графо-аналитическое решение этой задачи в общем случае, как и почти всегда при схемах усложненной конфигурации, становится весьма громоздким и трудоемким. Лишь для магнитных усилителей напряжения, когда входной сигнал должен быть усилен только по напряжению, а выходная мощность при этом может быть весьма малой, расчет реверсивных схем становится простым.
Полагая полное сопротивление нагрузки Z значительно больше статического [см. выражение (187)] индуктивного сопротивления выходных обмоток дросселей на всех режимах работы
Z raquo;X ,
можно считать, что усилитель напряжения работает на холостом ходу. Кроме того, будем полагать, что активное сопротивление выходных обмоток значительно меньше их индуктивного сопро-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 [ 66 ] 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |




