 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нагревание и охлаждение
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 [ 38 ] 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 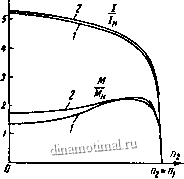
Рис. 32. Пусковые характеристики коротк gt; замкнутых двигателей.
/-с глубокими пазами; 2-с двойной клеткой
МОЩНОСТИ (до 1СЮ кет) эти отнощения составляют:
нач 1.1/1 нлч
= 1-ь1,4 при -р = 5,56,5.
В последние годы для коротко-замкнутых роторов применяются пазы в виде представленных на рис. 3-63. Здесь также получается увеличение гг из-за вытеснения тока, но при мень-пей глубине паза, чем в случае глубоких пазов по рис. 3-61.
М. О. Доливо-Добровольскйй впервые применил для короткозамкнутых двигателей двойную клетку на роторе (1893 г.). Применяемые при этом пазы показаны на рис. 3-64. В верхних пазах помещают стержни повыщенного активного сопротивления, в нижних пазах-стержни с относительно малым активным сопротивлением.
Индуктивное сопротивление нижних стержней, получается в нескоаько раз больше индуктивного сопротивления верхних стержней в соответствии с различием потокосцеплений тех и других. Потокосцепление нижних стержней определяется главным образом размерами прореза между верхней и нижней частями паза. Так как




Рис. 3-64. Пазы ротора с двойной клеткой.
распределение тока между стержнями при больших скольжениях зависит в основном от их индуктивных сопротивлений, значительно превышающих их активные сопротивления, то ток вытесняется в верхние стержни, образующие клетку, называемую пусковой.
При малых скольжениях распреде-.ление тока будет зависеть в основном от активных сопротивлений клеток. Ток при этом будет проходить главным образом по нижней клетке, которая называется рабочей.
При пуске, когда ток проходит главным образом по верхним стержням, они сильно нагреваются. Чтобы нагрев верхних стержней за время пуска не получился чрезмерным, их выполняют из латуни или бронзы, чем достигается увеличение теплоемкости стержней вследствие увеличения их веса прн одновременном увеличении их активного сопротивления (по сравнению с медными стержнями).
Неодинаковое нагревание верхних и нижних стержней при пуске приводит к неодинаковому их удлинению. Поэтому для двигателей с большой длиной ротора приходится применять отдельные короткозамыкающие кольца для верхних и нижних стержней (рис. 3-65; см. также рис. 3-126).
При выполнении двойной клетки из алюминия применяются пазы формы, показанной на рис. 3-64 справа. На торцах обе клетки в этом случае имеют общие короткозамыкающие кольца.
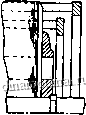
Рис. 3-63. Пазы короткозамкнутого ротора. 11 laquo;
Ри:. 3-65. Ротор с двойной клеткой.
Двигатели с двойной клеткой на роторе позволяют получить лучшие пусковые характеристики (рис. 3-62), чем двигатели с глубокими пазами на роторе, что достигается путем выбора надлежащих соотношений между параметрами верхней и нижней клеток. Поэтому в случае необходимости иметь короткозамкнутый двигатель с повышенным пусковым моментом при относительно небольшом пусковом токе его выполняют с двойной клеткой на роторе.
Короткозамкнутые двигатели иногда пускаются для ограничения пускового тока при пониженном напряжении. Для этой цели в цепь статора на время пуска включают активное сопротивление, реактор или автотрансформатор ( sect; 4-8,д).
Применяется также пуск при переключении обмотки статора со звезды на треугольник (рис. 3-66), если при данном напряжении сети она должна сыть соединена в треугольник. Во время пуска она соединяется звездой, а по окончании разбега переключается на треугольник. Следовательно, напряжение, приходяцееся на фазу при пуске, будет в 3 раз меньше, чем при работе.
При этом (если считать параметры двигателя постоянными) начальный пусковой фазный ток уменьшается также в Уз раз, а линейный ток - в 3 раза (в действительности вследствие уменьшения при больших токах Xi и Xi, вызванного насыщением коронок зубцов полями рассеяния, уменьшение тока получается больше чем в 3 рази).
При понижении напряжения, приложенного к обмотке статора, заметно уменьшается начальный пусковой момент, пропорциональный квадрату первичного напряжения. Поэтому пуск при пониженном напряжении применяется только в тех случаях, где не требуетсябольшой начальный момент ( например, для электропривода к вентилятору).
Многие мощные сети, имеющиеся на заводах и электрических станциях Советского Союза, допускают непосредственное включение коротко-.замкнутых двигателей больших мощностей (на сотни киловатт).
Обматка статора
Пуск

Работа
Рис. 3-66. Схема пуска короткозамкнутого двигателя при переключении обмотки статора со звезды иа треугольник.
Благодаря сравнительно небольшой стоимости, простоте конструкции, большой надежности в работе и удобству в обслуживании короткозамкнутые двигатели получили значительно большее распространение, чем двигатели с контактными кольцами.
Короткозамкнутые двигатели мощностью примерно до 100-125 кет обычно выполняются со скошенными пазами ротора или статора (приблизительно на пазовое деление статора). При этом уменьшаются laquo;паразитные моменты raquo;, действующие иа ротор и статор машины. Оии создаются высшими гармониками полей статора и ротора, в том числе гармониками полей, обусловленными неравномерностью воздушного зазора из-за наличия пазов. При неправильно выбранном числе пазов ротора laquo;паразитные моменты raquo; могут вызвать заметное ослабление пускового мо.мента и шум как при ;Уазбеге двигателя, так и при его работе.
3-20. Регулирование скорости вращения
Асинхронные двигатели обычно применяются для электроприводов, которые работают с постоянной скоростью вращения. Но иногда они применяются для регулируемых электроприводов. Рассмотрим возможные способы регулирования скорости вращения.
1. На практике иногда для регулирования скорости вращения асинхронного двигателя используется реостат в цепи ротора, имеющего обмотку, присоединенную к контактным кольцам.
Увеличение активного сопротивления цепи ротора приводит к увеличению скольжения и, следовательно, к уменьшению скорости вращения двигателя, что видно из кривых M=:f{S)
при различных (r2-i-r), представлен-
ных на рис. 3-60. Здесь при М. = =const (соответствует работе электропривода с подъемным краном) точки пересечения кривой M. = f{s) с указанными кривыми определяют скольжения при различных значениях (г+Гд). Регулирование здесь возможно в широких пределах, причем плавность регулирования, очевидно, зависит от числа ступеней реостата.
Указанный способ регулирования неэкономичен, так как он связан с непроизводительной затратой энергии в реостате. Действительно, согласно (3-69) получаем:
Отсюда видно, что увеличение скольжения s при М = const приводит к увеличению электрических потерь в роторной цепи. Если, например, S увеличивается при М = const вследствие введения в роторную цепь сопротивления гд от 0,02 до 0,5, что соответствует уменьшению скорости вращения приблизительно вдвое, то почти половина мощности Рэм непроизводительно теряется в реостате.
При регулировании скорости вращения двигателя при помощи реостата в цепи ротора следует иметь в виду, что его механическая характеристика (рис. 3-67) может получиться резко падающей, недопустимой, например, для электропривода к токарному станку.
Для целей регулирования не следует применять пусковые реостаты, так как они предназначаются для кратковременной нагрузки. Регулировочные реостаты должны иметь большие размеры, чтобы получилась достаточная поверхность охлаждения
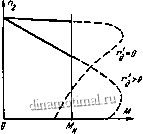
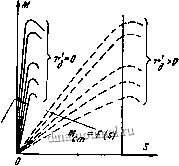
Рис. 3-67. Механические характеристики = = /(jM) двигателя с контактными кольцами при сопротивлении Лд == О и при дО.
Рис. 3-68. Регулирование скорости вращепил путем изменения напряжения (/,.
для рассеяния тепла, образующегося в реостате.
2. Скорость вращения асинхронног го двигателя можно регулировать также путем изменения напряжения Vx на зажимах статора. Однако такой способ регулирования при малом сопротивлении роторной цепи позволяет изменять скорость враихения лишь в небольших пределах, что следует из рис. 3-68, где сплошные кривые представляют собой зависимости M = f(s) при различных напряжениях Ui и при г = 0.
Можно расширить пределы регулирования путем изменения t/ включив в роторную цепь добавочное сопротивление Гд (пунктирные кривые на рис. 3-68).
Изменение напряжения Ui производится при помощи регулировочных трансформаторов, реактивных катушек с выдвижным сердечником, переменных активных сопротивлений, включенных в цепь статора, а также при помощи магнитных усилителей.
3. В относительно редких случаях регулирование скорости вращения осуществляется путем изменения частоты /, тока, подводимого к двигателю. При этом изменяется скорость вращения
60-f,
поля п, = -- , а следовательно, и ротора. Такой способ регулирования требует наличия отдельного генератора переменного тока с регулируемым первичным двигателем.
4. На практике применяется также способ ступенчатого изменения скорости вращения путем изменения числа пар полюсов обмотки статора. Соот-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 [ 38 ] 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 |




