 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нагревание и охлаждение
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [ 46 ] 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92
главному потоку, проходящему через зазор. Он насаживается на цилиндрический выступ щита.
Полый ротор 3 представляет собой тонкостенный стакан, выполняемый обычно из алюминиевого сплава. Дно стакана жестко укрепляется на валу 7. Толщина его стенки колеблется от 0,2 до I мм. Такой ротор имеет очень небольшой момент инерции, что во многих случаях и требуется от исполнительного двигателя.
Зазором в двигателе следует считать зазор между внешним и внутренним статорами. Он относительно велик: 0,5-1,5 мм. Вследствие этого возрастают намагничивающие токи обмоток, что приводит к увеличению электрических потерь в них. Кроме того, большие электрические потери возникают в роторе. Поэтому к. п. д. рассматриваемого двигателя имеет низкие значения. Из-за больших потерь приходится увеличивать размеры двигателя, чтобы получились доста-Iочные поверхности охлаждения.
Вращающий .момент двигателя создается в результате взаимодействия вращающегося поля и вихревых токов, наведенных и.м в цилиндрической части ротора. С некоторым приближением можно контуры вихревых токов заменить эквивалентной клеткой. Активное сопротивление г. такой клетки получается большим, тогда как ее индуктивное сопротивление Х2 невелико: Х2 laquo;= (0,05-0,1 )г2. При этих условиях в большой степени удовлетворяются указанные требования, предъявляемые к исполнительному двигателю.
В качестве исполнительного двигателя применяется также асинхронный двигатель с ферромагнитным полым ротором. Такой ротор выполняется в виде полого цилиндра из стали при толщине его стенки от 0,5 до 3 мм. Здесь внутренний статор не требуется, так как поток будет проходить по стенкам цилиндра. На торцах ротора укрепляются диски. Сквозь центральные отверстия дисков проходит жестко связанный с ними вал. Следовательно, конструкция получается более простой, чем в предыдущем случае. .
Выполнение его обмоток статора.и схемы их включения такие же, как
у двигателя с немагнитным полым ротором (рис. 3-98).
Воздушный зазор между статором и ротором в рассматриваемом двигателе берется небольшой (0,2-0,3 мм); однако намагничивающие токи его обмоток почти такие же, как у двигателей с немагнитным полым ротором. Объясняется это тем, что магнит11ая проводимость ферромагнитного поло-10 ротора вследствие малой его толщины незначительна.
Активное сопротивление Гг такого ротора велико, так как удельное сопротивление стали значительно больше, чем меди и алюминия, и, кроме того, здесь резко сказывается эффект вытеснения тока к внешней цилиндрической поверхности ротора, особенно при большой частоте /2=5/1.
С целью уменьшения Г2 иногда производится омеднение ротора: гальваническим путем внешняя цилиндрическая поверхность ротора покрывается слоем меди толщиной 0,05-0,1 мм, а торцовые поверхности - слоем меди толщиной до 1 мм. Однако при этом возрастает зазор (от статора до стальной поверхности ротора). Поэтому в ряде случаев ограничиваются омеднением только торцовых поверхностей ротора.
По быстродействию двигатель уступает двигателю с немагнитным полым ротором.
Находит себе применение в качестве исполнительного двигателя и ко-роткозамкнутый двигатель с беличьей клеткой на роторе, имеющей большое активное сопротивление. Его обмотки статора включаются также по схемам, приведенным на рис. 3-98.
Следует еще рассмотреть асинхронный двигатель с массивным ферромагнитным ротором, который применяется в качестве исполнительного, когда приходится приводить во вращение тяжелые маховые массы и когда, следовательно, собственный момент инерции двигателя имеет относительно малое значение. Характеристики этого двигателя несколько лучтпе, чем у двигателя с ферромагнитным полым ротором. Здесь также иногда применяется омеднение ротора.
Конструкция массивного ротора - более простая и механически значи-
тельно более прочная и надежная, чем полого ротора и ротора с беличьей клеткой, собранного из тонких листов. Этим и объясняется, что двигатели с массивным стальным ротором в настоящее время выполняются на очень большие скорости вращения (до 120 000-150 000 обIмин).
К недостаткам рассматриваемого двигателя, препятствующим его применению взамен обычного короткозамкнутого двигателя, следует отнести относительно низкий максимальный момент M из-за повышенного индуктивного сопротивления Х2 ротора, большие потери в роторе и, следовательно, низкий к. п. д.
3-24. Асинхронные тахометрические генераторы
Тахометрические генераторы сокращенно называются тахогенерато-рами. Они служат для преобразования механического вращения в электрический сигнал (напряжение) и широко применяются в настоящее время в схемах различных автоматических устройств, в частности, для автоматизированного электропривода. Они могут также служить для измерения скорости вращения вместо обычных механических тахометров.
Наибольшее распространение из тахогенераторов переменного тока получили асинхронные тахогенераторы с немагнитным полым ротором, по выполнению не отличающиеся в основном от соответствующих исполнительных двигателей (см. рис. 3-100).
Принципиальная схема включения такого асинх,ронного тахогенератора показана на рис. 3-102. Здесь также на статоре расположены две обмотки d и оси которых - продольная и поперечная- сдвинуты в пространстве на 90 эл. град.
К обмотке d подводится переменное напряжение Ud, имеющее постоянные амплитуду и частоту; тогда при вращении ротора тахогенератора на зажимах обмотки q возникает напряжение Uq: Это напряжение будет иметь ту, же частоту, что и Ud, и практически будет изменяться пропорционально cRopocTH вращения ротора.
Принцип действия асинхронного тахогенератора основан на следующем.
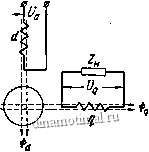
Рис. 3-102. С.чема включения асинхронного тахогенератора (к объяснению принципа действия raquo;.
Будем считать, что к обмотке d подведено напряжение f/d=const при /] = const. Если при этом ротор неподвижен, то возникнет переменный магнитный поток, пульсирующий с частотой fi по оси обмотки d, аналогичный потоку трансформатора при коротко-замкнутой вторичной обмотке. Роль последней в тахогенераторе выполняют контуры ротора, оси которых совпадают с осью обмотки d.
Если ротор вращается, то мы можем мысленно представить себе, что контуры с продольной осью как бы неподвижны в пространстве, так как на смену одним проводникам этих контуров непрерывно поступают другие. Следовательно, как и при неподвижном роторе, в них будут наводиться продольным потоком Ф(г э. д. с. трансформации (?dT, имеющие частоту /]. Но теперь будем иметь также контуры, в которых будут наводиться э. д. с. вращения (? lt;jbp от пересечения проводниками магнитных линий потока Фd Оси этих контуров будут совпадать с поперечной осью, и возникшие в них токи будут создавать поперечную н. с. и, следовательно, поперечный поток Ф(,.
Можем принять, что э. д. с. вращения в поперечном контуре равна:
,вр = 2/у5 sin Ы. Если сюда подставить окружную ско-рость ротора = -60 индукцию в зазоре = с,Ф sin laquo; gt;t с,Ф sin 21,t {Ф - амплитуда продольного потока; с, - коэффициент пропорциональности), то получим:
(:/:2 - также коэффициент пропорциональности). Из последнего равенства с;увдует, что э. д. с. вращения в поперечных контурах пропорциональны скорости вращения п, имеют частоту Д и находятся или в фазе, или в проти-вофазе с потоком Фа. Такую же частоту /i будут иметь токи, вызванные э. д. с. вдвр в поперечных контурах, и созданный ими поток Ф пульсирующий по поперечной оси. Поток Фд, приблизительно пропорциональный скорости вращения п, будет наводить в поперечных контурах ротора э. д. с. трансформации lt;,т и в то же время э. д. с. Едт в обмотке статора д.
Электродвижущие силы eg будут направлены почти прямо противоположно по отнощению к э. д. с. вдвр, их результирующие будут создавать токи в поперечных контурах. Если поперечные контуры заменить эквивалентной поперечной обмоткой, приведенной к обмотке статора q, то ее можно рассматривать как первичную обмотку трансформатора, а э. д. с. вращения Едлр такой обмогки - как подведенное к ней напряжение. Тогда дт - э.д. с. трансформации, наведенная потоком Ф, в этой эквивалентной обмотке. Она сдвинута по фазе почти на 180 град относительно э. д. с. .вр. Напряжение Од найдем, если вычтем из Едт падения напряжения в обмотке д.
Тот же поток Фд будет наводить э. д. с. вращения edsp в продольных контурах ротора, которые будут пропорциональны скорости вращения п, иметь частоту fi и находиться в про-тивофазе или в фазе с потоком Фд. Если также заменить продольные контуры ротора эквивалентной продольной обмоткой, приведенной к обмотке статора d, то ее можно рассматривать как обмотку трансформатора, а э. д. с. трансформации Edr такой обмотки - как подведенное к ней напряжение. Электродвижущая сила вращения Edsp, наведенная потоком Ф в этой эквивалентной продольной обмотке, будет сдвинута по фазе относительно э. д. с. dT почти на 180 грай. Напряжение Ud будет иметь составляющую-Edt и составляющие равные падениям напряжения в обмотке d.
Количественные соотношения, определяющие напряжение Од при задан-
ных напряжении Ud и скорости вра- щения п могут быть найдены из ре- шения комплексных уравнений, со ставленных на основе представленной выше физической картины процессов в тахогенераторе.
Путем подбора параметров тахо- генератора и внешней нагрузки Za удается свести его -погрешности до очень малых значений. Под погрешностями здесь понимаются отклонение зависимости Ug=f(n) от линейной и
отклонение сдвига мелду Ud а Од ot 90 град.
3-25. Асинхронный преобразователь частоты
Электрическую энергию на заводах, фабриках, при строительных работах, в шахтах, сельском хозяйстве обычно получают от сети трехфазного тока нормальной чаётоты 50 гц. Для преобразования тока в другую частоту может быть использован асинхронный преобразовател! частоты, пред: сгавляющий собой асинхронную машину с контактными кольцами, приводимую во вращение каким-либо двигателем. Приводным двигателем обыч по служит короткозамкнутый асинхронный двигатель.
Асинхронные преобразователи ча стоты широко применяются для повышения частоты тока, например, в тех случаях, когда для питания быстро-, ходных асинхронных двигателей тре. буется ток более высокой частоты, чем 50 гц. Другие агрегаты для преобразования частоты тока (например, синхронный генератор с приводным! двигателем) в тех же случаях оказываются более дорогими, особенно при* небольших мощностях. i
На рис. 3-103 представлена приш; ципиальная схема включения асин
2
Рис. 3-103. Схема включения асяхроиного пре raquo;! обра.чователя частоты.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [ 46 ] 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 |




