 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нагревание и охлаждение
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 [ 58 ] 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92
Рнс. 4-28. Упрощенная схема замещения синхронной машины.
С диаграммой на рис. 4-27 можно начертить схему замещения, в виде представленной на рис. 4-28.
В дальнейшем упрощенную диаграмму будем использовать главным образом для качественного рассмотрения процессов в синхронной машине. В этом случае она позволяет наглядно и просто разрешать многие вопросы.
ж) Синхронные индуктивные сопротивления по продольной и поперечной осям машины. Обратимся к диаграмме явнополюсного генератора, имеющего ненасыщенную магнитную цепь (рис. 4-29). Его характеристика холостого хода в этом случае представляет собой прямую линию. Для такой машины мы можем применить метод наложения, т. е. считать, что в воздушном зазоре существуют независимо один от другого поток полюсов и потоки реакции якоря-продольный Ф и поперечный Ф. Тогда можно индуктирующее действие каждого из этих потоков рассматривать отдельно, как это обычно делают в отношений потокосцепления К.
Поток lt;i gt;( созданный н. с. обмоткн возбуждения, наводит в обмотке якоря э. д. с. Потоки Ф и Ф наводят в обмотке якоря э. д. с. Ё и Ё.
При принятых допущениях имеем:
следовательно, можем написать
.. = ./шф = .х Л. (4-20)
где х - индуктивное сопротивление, обусловленное продольным потоком реакции якоря.
/ = /5!пф (4-21)
называют .продольным током синхронной машины.
Аналогично можем написать:
сю аа aq ~
=х /С08ф = л- / , (4-22)
aq aq ~ . aq q f
где - индуктивное сопротивление, обусловленное поперечным потоком реакции якоря;
/ == / созф
(4-23)
- поперечный ток синхронной машины.
Имея в виду, что можем
согласно рис. 4-29 и приведенным соотношениям каиисать:
\FG\=\FB\-Y /G] = + sinф
1 GC\ \GH 1 + \НС\ = Е + Е cos ф=
( ., + -.)=/Л
(GC1
cos gt; COS if я
Сопротивление
.=~--..+-. (-24)
называется синхронным индуктивным сопротивлением по продольной оси, а сопротивление
(4-25)
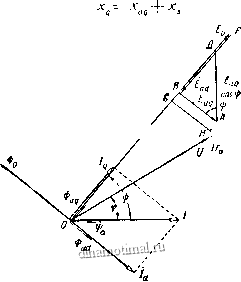
Рнс 4-29. Диаграмма иенасышенного явнополюсного генератора.
синхронным индуктивным сопрогивлением по поперечной оси.
После замены в диаграмме на рис. 4-29 э. д. с. соответствующими индуктивными падениями напряжения она получает вид, представленный на рис. 4-30. Полученную диаграмму условно называют видоизмененной. При ее построении предполагалось, что машина ненасыщена; поэтому использовались так называемые ненасыщенные значения параметров x,i и Хд. В действительности при нормальных условиях работы машины стальные участки ее магнитной цепи будут насыщенными, вследствие чего Xd и х будут меньше их ненасыщенных значений.
Индуктивное сопротивление Xq приближенно считают постоянной величиной, не зависящей от насыщения.
Величину Xad можно определить по значению э. д. с. Ead, условно учитывающему насыщение по продольной оси, илн по значению э. д. с. Ead, приближенно соответствующему действительному насыщению по продольной оси (см. рис. 4-24). Очевидно, что индуктивное сопротивление Xd не может считаться постоянной величиной- оно будет изменяться с насыщением машины.
Как отмечалось, в основу метода двух реакций положено допущение независимости друг от друга продольного и поперечного магнитных полей машины. Этр позволяет процессы в машине рассматривать отдельно по ее продольной и поперечной осям.
Oonep/viiai
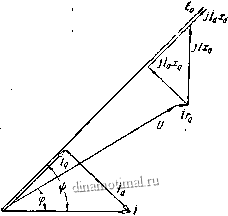
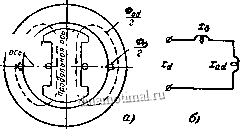
Рис. 4-30 Видоизмененная диаграмма ненасыщенного явнополюсгюго генератора.
12 raquo;
Рис. 4-31. Продольное поле реакции якоря и поле рассеяния (а). Схема замещения по продольной оси {б).
Чтобы лучше уяснить физическое значение параметров Xd и Xq, представим себе следующие опыты, проведенные с синхронной машиной. Пусть ротор машины с разомкнутой обмоткой возбуждения приводится во вращение с синхронной скоростью посторонним двигателем. При этом к статору подведен трехфазный ток, создающий н. с, вращающуюся с синхронной скоростью в направлении вращения ротора. Допустим, что при опыте удалось установить ось вращающейся н. с. статора так, чтобы она совпадала с осью полюсов, т. е. с продольной осью машины. Тогда распределение поля, созданного н. с. статора (в данном случае продольной), получится таким, как показано на рис. 4-31,а. На рис. 4-31,а видим, что поток, сцепленный с фазой статора, состоит из потока и потока Ф. В соответствии с этим индуктивное сопротивление обмотки статора будет равно х = х,-\- х а наведенная в обмотке статора потоками Ф, и Ф э. д. с. равна Е,-{-Е.
Следовательно, измеряя при этом опыте напряжение, ток и мощность, можно было бы определить Xd, так же как при опыте холостого хода трансформатора определяется Xi+xz- В соответствии с изложенным для продольной оси машины можно начертить схему замещения, изображенную на рис. 4-31,6.
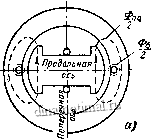
Аналогичным образом можно было бы определить Xq. Действительно, представим себе, что при опыте удалось установить ось вращающейся н. с. статора так, что она совпадает с поперечной осью машины. Ротор при чтом вращается в ту же сторону и с такой же скоростью, что и н. с.
5-(ТГ gt;-1
Рис. 4-32. Поперечное поле реакции якоря н поле рассеяния (а). Схема замещения по поперечной оси (б).
Тогда получим распределение поля, схематически показанное на рис. 4-32,а. В этом случае по данным измерении тока, напряжения и мощности можно
было бы найти Kq= СхСМу
замещения для поперечной оси машины можно начертить, как показано на рис. 4-32,6.
Проведение указанных опытов связано, однако, с большими практическими затруднениями; поэтому для определения кл и применяются другие методы, в частности, так называемый метод скольжения, который заключается в следующем.
Ротор с разомкнутой обмоткой возбуждения приводится во вращение в сторону вращения поля статора со скоростью, несколько меньшей (или большей), чем скорость поля. Статор в это время получает трехфазный ток от постороннего источника. Ось полюсов будет перемещаться относительно оси н. с. статора со скоростью скольжения, которое должно быть установлено по возможности небольшим. При совпадении оси н. с. статора с продольной осью машины индуктивное сопротивление обмотки статора будет наибольшим, равным кл. При совпадении оси н. с. статора с поперечной, осью машины индуктивное сопротивление обмотки статора будет наименьшим, равным Kg. Соответственно изменению индуктивного сопротивления
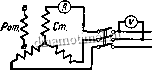
Рис. 4-33. Схема опыта для определения х и х по методу скольжения.
обмотки статора получим медленные колебания стрелок амперметра и вольтметра, показанных в схеме опыта на рис. 4-33.
Определяя при опыте
, где (У и /
г- и
У 3/ /макс
показания вольт-
метра и амперметра, получим;
V 3[ J макс
Активным сопротивлением ввиду его малости по сравнению с JCd и пренебрегаем. Опыт надо проводить при небольших напряжении и токе, чтобы иметь ненасыщенную машину и, следовательно, ненасыщенные значения
Xd и Хд.
Поле реакции якоря неявнополюс-ной машины практически не зависит от положения оси н. с. статора относительно оси полюсов, поэтому для неявнополюсных машин можно считать:
Xc = Xd = \.
(4-26)
Небольшое различие между Xd и Xq (Обычно не выше 3-4%) таких машин обусловлено неравномерным распределением пазов и зубцов по окружности ротора.
з) Применение системы относительных единиц в теории синхронных машин. Система относительных единиц или долевых значений в настоящее время широко применяется при всякого рода практических расчетах, связанны.х с исследованием синхронных машин. К ее основным преимуществам нужно отнести то, что она облегчает расчеты, так как здесь при вычислениям приходится иметь дело с величинами, близкими к единице, а также то. что результаты расчетов в системе относительных единиц для машин различных типов и различной мощности мало отличаются друг от друга и поэтому легко позволяют производить сравнение машин.
При этой системе величины, характеризующие режим работы машины, , н ее параметры выражаются не
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 [ 58 ] 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 |




