 |
www.chms.ru - вывоз мусора в Балашихе |
|
www.chms.ru - вывоз мусора в Балашихе |
Динамо-машины Нагревание и охлаждение
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 [ 68 ] 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92
обмотке / = 0. Следоййтельн raquo;, отключение второго генератора от общих шня не вызовет никаких, нежелательных явлений, так как при этом не будет резкого изменения режима работы первого генератора.
г) Электромагнитная.и синхронизирующая мощности явнополюсной машины. В предыдущем при определении электромагнитной и синхронизирующей мощностей мы исходили из упрощенной диаграммы, не учитывающ;ей ни насыщения машины, ни различия магнитных проводимостей по ее продольной и поперечной осям.
. Найдем тепер!? выражения для Рэм и Рс явнополюсной машины с учетом разлиия ее параметров по продольной и поперечной осям. При этом будем также пренебрегать активным сопротивлением обмотки статора и насыщением магнитной цепи машины.
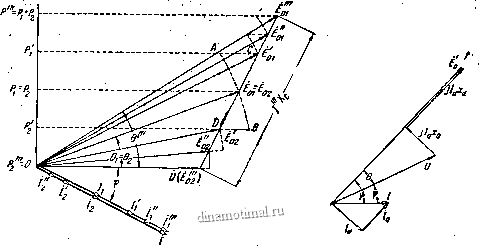
Обратимся к видоизмененной диаграмме явнополюсной мЗшииы, представленной на рис. 4-71. Из этой диаграммы имеем: ..
Р = Р = mUI cos lt;f i= mUI cos ( lt; gt;-6) =
= mf cos 4 raquo; cos 6 +/иС sin. sin 9.
Имея в виду,
/ cos t! gt; = / и / sin ф = /
ИЗ рис.
-Т найдем: и sin е
. Е ~и cos (
Подставляя найденные значения в урав- нение для Р, после преобразований получим:
+ (-)in29. (475)
Полученное выражение для электромагнитной мощности явнополюсной машины показывает, что эта мощность-зависит не только от возбуждения,; но.
и от различия Xd Vl Xq.
Из (4-75) следует, чтр явнополюсная машина может pa6otaTb без возбуждения, т. е. при о=0. В этом случае она называется реактивной машиной, работа которой будет рассмотрена в последующем ( sect; 4-10).
Разделив (4-75) на синхронную, угловую скорость, полу1Чим уравнение для электромагнитного вращающего момента, развиваемого явнополюсной машиной: , ;
-sin6 +
Biropofl член правой части этого урав-. ненин равен так называемому реактивно му мо м е н т у: ,
р = й(з-:)-п29- (4-77);
Равенства (4-75) н (4-76), очевиднйй применимы и для неявнополюсной
Рве. 4-70. К параллельной работе генераторов одинаковой мощности (перевод нагрузки с однрго генератора на другой).
Рис. 4-71. Видоизменен- Щ пая диаграмма явнополюс- ной машины, j
шины. Для этой машины можно считать равным х, поэтому равенство (4-75) будет точно такое же,
sin 6,
(4-78)
как и ранее полученное равенство (4-09), где х = х.
В соответствии с (4-75) на рис. 4-72 построена кривая, выражающая зависимость Р от угла 6, т. е. угловая характеристика явнополюсного генератора.
Продифференцировав равенство (4-75) по углу S, получим выражение для удельной синхронизирующей мощности явнополюсной машины:
Р = mU cos Ь-\-
j-mU(4---LUos29. (4-79)
Кривая P = f(B) также показана на рис. 4-72.
По предложению проф. Г. И. Петрова угловую характеристику и максимальную электромагнитную мощность Рам.м МОЖНО опре-лелить с учетом насыщения и активного сопротивления обмотки якоря следующим образом: надо построить несколько регулировочных характеристик /в = /(/) при [/ = const и С05ф=соп51 для различны.х cos ф и кривые в -}(/) при тех же условиях; затем соответ-, ственно номинальному току возбуждения /B.H=const провести линию, параллельную оси абсцисс; тогда точки пересечения этой линии
; с указанными кривыми дают величины, необходимые для построения угловой характеристики (регулировочные характеристики и кри-еые 6=/(/) для!различных cos ф должны быть построены при помощи векторных диаграмм и
: характеристики холостого хода).
д) Статическая перегружа-ё мость синхронной машины. iСтатическая перегружаемкость S син-5осронной мащины, так же как и предел tee статической устойчивости, опреде-jlfl,eTCfl отношением
о эм.м
(4-80)
Это отношение представляет собой дождевое значение максимальной электро-f магнитной мощности при и 7, ко-sTopoe для неявнополюсной машины
гИ п. С. Сергеев.
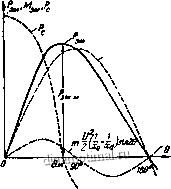
Рис. 4-72. Угловая характеристика явнополюсной машины.
можно выразить при помощи равенства (4-78) следующим образом:
эм. м
нн COS lt;р COS у
. (4-81)
кратность
тока короткого замыкания при номинальном возбуждении (Е - э. д. с. по
спрямленной характеристике холостого хода при 1) или
S*=0K3
(4-82)
где 0K3 = f -кратность тока короткого замыкания при возбуждении холостого хода (см. sect; 4-3,0).
Полученное выражение, которое обычно используется при практических расчетах, является приближенным, потому что оно было выведено без учета активного сопротивления обмотки статора и насыщения магнитной цепи машины.
Активным сопротивлением обмотки статора в обычных случаях можно пренебречь, так как оно оказывает ничтожное влияние на Р . Насыщение магнитной цепи в небольшой степени влияет на Р повышая его значение на не-
* Согласно гост 533-51 яа .Генераторы электрические паротурбинные двухполюсные (турбогенераторы) S не должна быть ниже 1.7.
сколько процентов и увеличивая угол б, соответствующий Р до 100-110 deg;.
Если не учитывать насыщения, то эмм явнополюсной машины, как следует из рис. 4-72, получается при Ь lt; lt;90 deg;. Значение 9 найдем, приравняв нулю первую производную от Р по 9, т. е. приравняв нулю Р.
Введем обозначения:
Тогда получим из (4-79):
Я=-=Лсоз9, + 5со8 29 = 0,
откуда
b = -:iA plusmn;V plusmn; (4.83)
Подставляя в (4-75) полученное значение 9 найдем P ,, а следовательно, согласно (4-80) статическую перегру-жаемость S.
4-8. Синхронный двигатель
а) Переход машины от работы генератором к работе двигателем. Если мощность на валу синхронной машины, работающей генератором параллельно с другими синхронными машинами, уменьшать, то угол 6
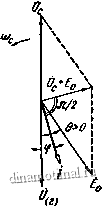

Рис. 4-73. Диаграмма генератора.
Рис. 4-74. Диаграмма двигателя.
будет также уменьшаться. При мощности на валу, равной нулю, угол * также равен нулю (если пренебречь потерями в машине). В этом случае э. д. с. машины прямо противоположна напряжению сети.
Если создать на валу машины тормозящий момент, то вектор э. д. -с. будет отставать от вектора напряжения и. Будем в этом случае считать угол 9 отрицательным. На рис. 4-7 gt; показана векторная диаграмма машины при работе генератором, а на рис. 4-74 при работе двигателем.
Из рис. 4-73 и 4-74 следует, что при переходе машины от работы генератором к работе двигателем фаза тока изменяется почти на 180 deg; в соответствии с изменением результирующего напряжения и-\-Ёд, действующего в цепи машины- Мощность, отдаваемая в сеть при работе машины двигателем, будет отрицательной: mUI cos ,9, а мощность,
потребляемая из сети, - положительной: mUJ cos tp gt; 0.
Синхронная машина при работе двигателем будет, так же как и при работе генератором, держаться в синхронизме. Зависимость между мощностью двигателя и углом 9, как показано в дальнейшем, не отличается, если пренебречь потерями, от той же зависимости для генератора.
б) Векторные диаграммы синхронного двигателя. Векторные диаграммы двигателя аналогичны векторным диаграм.мам генератора.
Диаграммы приходится строить при определении н. с. (или тока /в) обмотки возбуждения двигателя, рабо- -тающего при заданных напряжении сети {/с, токе / и cos ф. В этом случае при построении диаграмм, так же как и для генератора, должны быть известны параметры, характеристика холостого хода и обмоточные данные машины.
Диаграммы двигателя используются также при исследовании его рабочих свойств.
В зависимости от типа конструкции ротора двигателя обращаются к диаграммам или явнополюсной, или неявнополюсной машины. Для прибли-
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 [ 68 ] 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 |




